
Hardware-in-the-loop simulation with ISG-virtuos
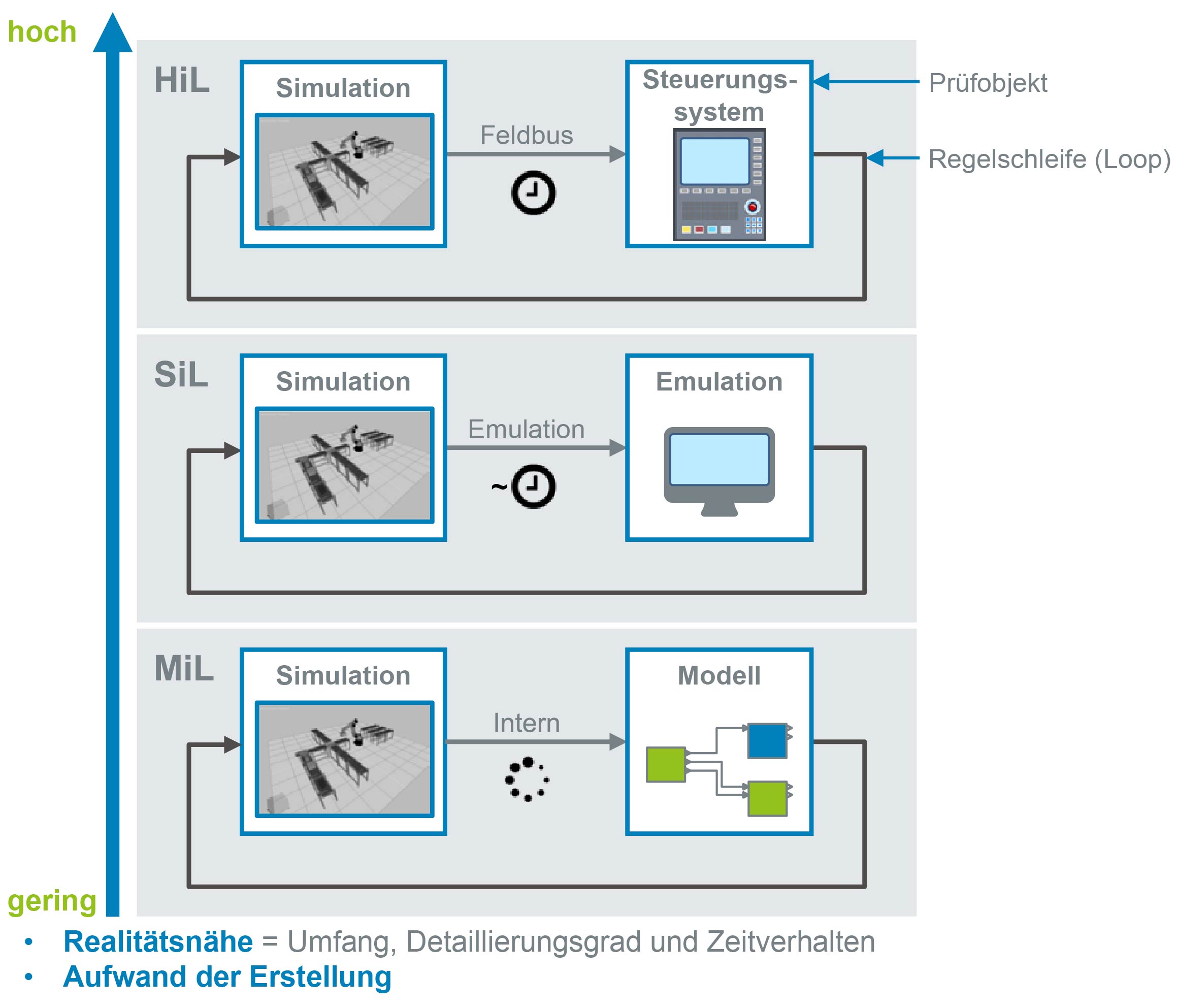
The software design of ISG-virtuos, which is specialized in real-time applications, enables hardware-in-the-loop simulation of automation systems in hard real-time ("control real-time" (<1ms)) by combining simulation and real control technology. The connection between control and simulation is established via common fieldbus systems and is thus independent of the control manufacturer.
The virtual machines, plants and robots are built up from virtual components that behave like the real components in terms of interfaces, parameters and operating modes. With the help of these virtual systems (the so-called "digital twins"), realistic test and commissioning situations are simulated, including all control functions in sequential (PLC) and motion control (MC, RC, CNC). These system tests can also be automated. The functions developed and tested in this way are then simply transferred to the real systems.