Type 1: Standard Method
Description
The standard method (type 1) is selected by setting the P-AXIS-00172 parameter to the value 1.
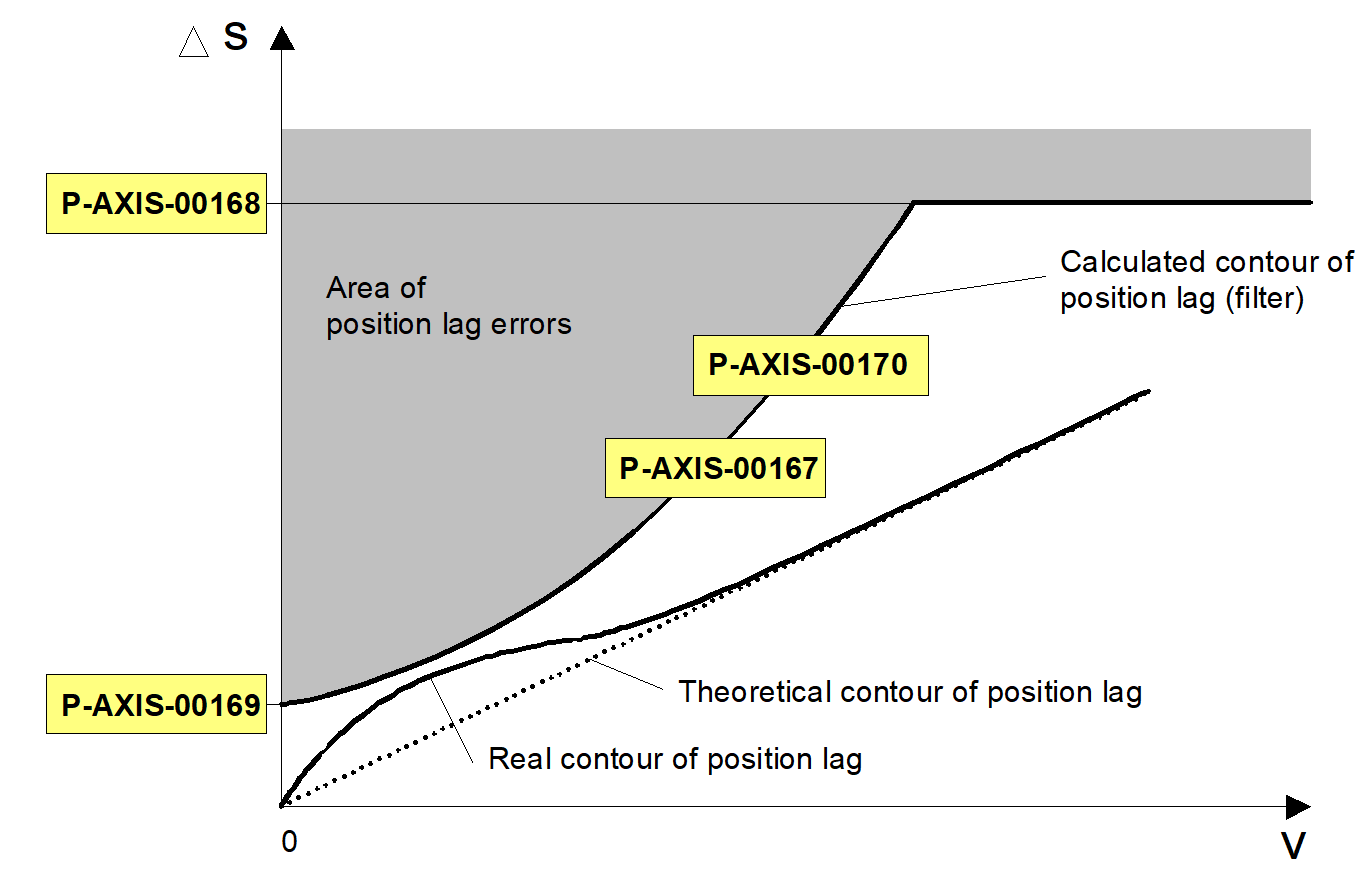
Type 1 uses an estimation filter to calculate the permitted position lag. This can be parameterised with the time constant P-AXIS-00167 of the filter. The permitted position lag is calculated depending on the velocity and lies within the parameterisable range.
The max. permitted position lag is P-AXIS-00168.
The min. permitted position lag P-AXIS-00169 is described here:
- at standstill: the maximum permitted position lag.
- with dynamic position lag monitoring, the lower limit of the permitted position lag.
A time offset of the permitted position lag can be carried out with P-AXIS-00170:
| ∆sperm~vcurr |
|
| ∆sperm | calculated permitted position lag |
| vcurr | current motion velocity |
Notice

The Standard Method does not consider the actual Kv factor in the calculation of the max. position lag. After a change in the position controller Kv factor, the monitor must be checked and re-adjusted.
Notice
Recommended parameterisation:
P-AXIS-00169 ≥ 5 · ∆sStandstill
∆sStandstill: real position lag at standstill. Even when the axis is at standstill, a remaining position lag ∆sStandstill is present with a P position controller due to the resolution of the encoder and the measuring system.