Erweiterte Programmierung von Achskopplungen („SOFT-GANTRY“) (#SET AX LINK, #AX LINK)
Versionshinweis
Die Verfügbarkeit dieser Funktionalität ist von der Konfiguration und dem Versionsumfang abhängig.
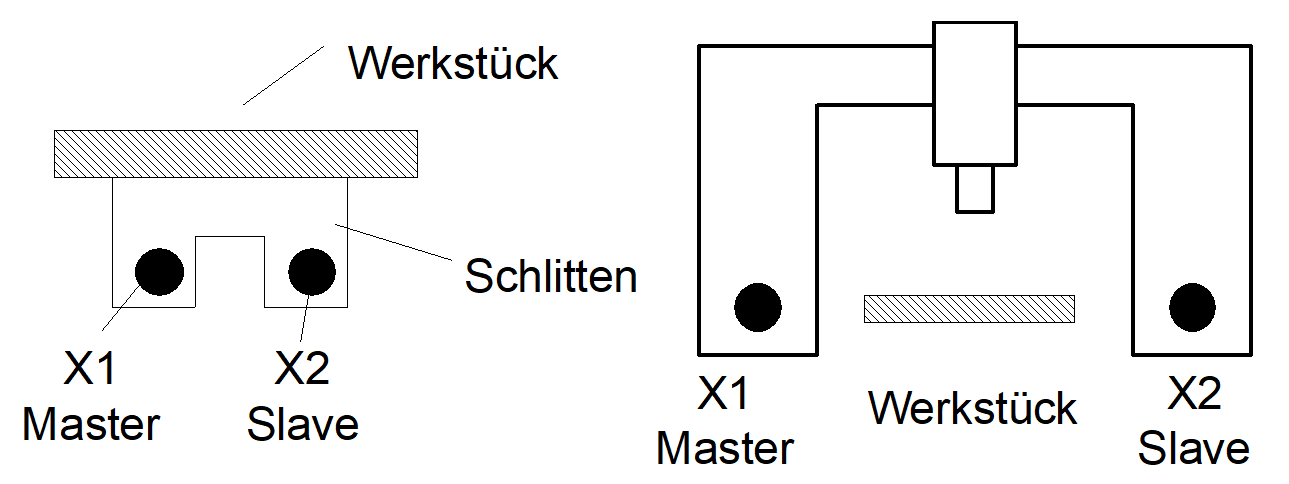
Bahnachsen können auch als s.g. Gantryachsen betrieben werden. Im Gegensatz zum normalen Synchronbetrieb sind hierbei zusätzliche Überwachungsmechanismen bzgl. Positionsabweichung aktiv und es gelten spezifische Fehlerreaktionen. Beim mechanischen (auch statischen) Gantrybetrieb sind die Achsen bedingt durch den Maschinenaufbau fest miteinander gekoppelt und durch die Konfiguration der Maschine festgelegt. Ein dynamischer Wechsel der Gantrykopplung ist nach Hochlauf der Steuerung nicht möglich (siehe nachfolgende Abbildung).
Neben Bahnachsen können auch Spindeln im Synchronbetrieb gefahren werden. Eine genaue Beschreibung ist in Kapitel Spindelsynchronbetrieb zu finden.
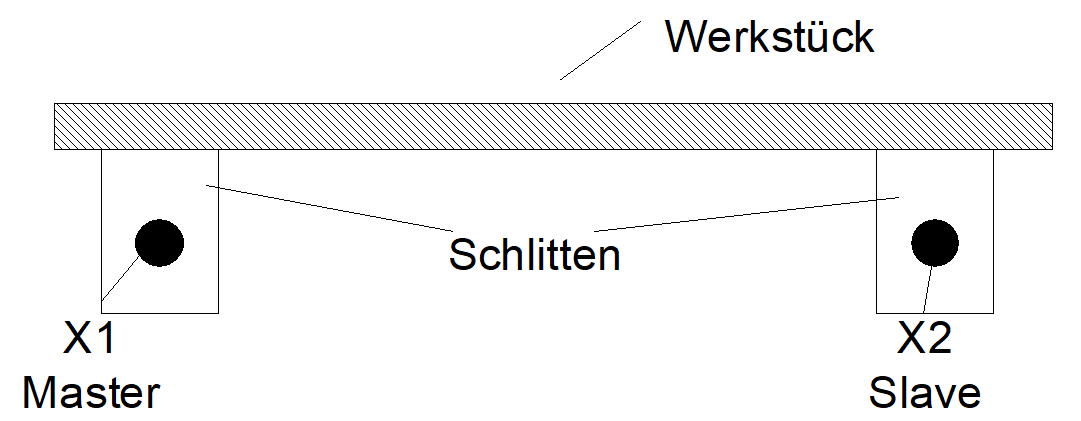
Maschinen, die von ihrem Grundaufbau her keinen mechanischen Gantrybetrieb ermöglichen, z.B. Fräsmaschinen mit zwei unabhängigen Schlitten, können durch Programmierung im Gantrybetrieb gefahren werden. Dies ist z.B. dann notwendig, wenn zum Spannen und Bearbeiten großer Werkstücke solche Schlitten miteinander gekoppelt werden müssen (siehe nachfolgende Abbildung)
Dazu stehen die in Kapitel Programmierung von Achskopplungen beschriebenen Befehle #SET AX LINK bzw. #AX LINK in einer erweiterten Syntax zur Verfügung:
Syntax: |
#SET AX LINK [ <Kopplungsgruppe>, [ <Slave>=<Master>,G [,<limit_1>, limit_2>] ] {, [ <Slave>=<Master>,G [,<limit_1>, limit_2>] ] } ] |
oder alternativ
#AX LINK [NBR] [ <Kopplungsgruppe>, [ <Slave>=<Master>,G [,<limit_1>, limit_2>] ] {, [ <Slave>=<Master>,G [,<limit_1>, limit_2>] ] } ] |
<Kopplungsgruppe> | Nummer der Kopplungsgruppe (1) |
<Slave> | Achsbezeichnung oder logische Achsnummer der Slaveachse des Kopplungspaares i (2) |
<Master> | Achsbezeichnung oder logische Achsnummer der Masterachse des Kopplungspaares i (2) |
NBR | Mit dem Logikschalter NBR wird auf die Auswertung von logischen Achsnummern anstatt von Achsnamen umgeschaltet. Die Achskopplungen müssen dann über die logischen Achsnummern definiert werden. Die Achsen müssen noch nicht im Kanal vorhanden sein. Erst bei der Aktivierung der Koppelgruppe wird ihr Vorhandensein geprüft! |
G | Schlüsselwort für "Gantrykopplung" |
(1) 1 ... [Max. Anzahl Kopplungsgruppen–1], siehe [6] -2.11
(2) Max. Anzahl Kopplungspaare, siehe [6] -2.12
Bei einer Gantrykopplung dienen die folgenden Werte zur zweistufigen Überwachung der zulässigen Positionsdifferenz der Gantryachsen. Angabe in [mm]. Positive Realzahl:
<limit_1> | Erste Überwachungsgrenze in [mm, inch]. Wird diese Grenze überschritten, wird die Bewegung abgebrochen und die Steuerung geht in den Fehlerzustand. Die Positionsdifferenz wird im Standardfall während RESET abgebaut. Applikationsspezifisch kann das Verfahren auch abweichend realisiert sein. |
<limit_2> | Zweite Überwachungsgrenze in [mm, inch]. Bei Überschreitung dieser Grenze erfolgt die Ausgabe eines nicht RESET-fähigen Fehlers. Die Steuerung muss ausgeschaltet und die Positionsdifferenz manuell behoben werden. |
Hinweis

Werden die Überwachungsgrenzen nicht programmiert, so gelten die Defaultwerte aus dem Achsparameterdatensatz P-AXIS-00072 und P-AXIS-00071 der Slaveachse.
Ergänzungen zur allgemeinen Handhabung und Wirkungsweise:
- Die Gantrykopplung erfolgt genau in den Positionen, in denen die Achsen zum Zeitpunkt der Anwahl der Kopplung sind. Die Angabe eines Offsets im NC-Befehl ist nicht notwendig, da die Berechnung des Offsets intern im Lageregler über die Sollpositionen erfolgt.
- Bei der Bahnbewegung werden die Dynamikdaten der Slaveachse berücksichtigt.
- Eine bei RESET oder am Programmende noch aktive Kopplung wird aus Sicherheitsgründen implizit beim nächsten Programmstart wiederhergestellt. Dieses Verhalten ist parametrierbar (P-CHAN-00104, P-CHAN-00105).
Programmierbeispiel

Erweiterte Programmierung von Achskopplungen („SOFT-GANTRY“)
N10 #SET AX LINK[1, [Y2=Y1,G,0.01,0.25]] | Gantrykopplung von Y1 als Masterachse und Y2 als Slaveachse. Erste Grenze ist 10µm, Zweite Grenze ist 250 µm. |
N20 #SET AX LINK[2, [Y2=Y1,G]] | Gantrykopplung von Y1 (Master) und Y2 (Slave). Es gelten die Überwachungsgrenzen des Achsparameterdatensatzes der Y2-Achse. |
N30 #SET AX LINK [3,[Y2=Y1]] | Standardkopplung von Y2 mit Y1. Kein Gantrybetrieb. |
oder alternativ |
|
N10 #AX LINK[1, [Y2=Y1,G,0.01,0.25]] | |
N20 #AX LINK NBR[2, [8=2,G]] | Gantrykopplung über log. Achsnummern |
Das parallele Bearbeiten von Werkstücken mit symmetrischer bzw. skalierter Kontur kann ebenfalls durch eine erweiterte Syntax des #SET AX LINK bzw. #AX LINK Befehls programmiert werden. In diesen Modi (Spiegeln bzw. Skalieren) erfolgt keine Überwachung von Positionsdifferenzen.
Syntax: |
#SET AX LINK [ <Kopplungsgruppe>, [ <Slave>=<Master>,<zähler>, <nenner> ] {, [ <Slave>=<Master>,<zähler>, <nenner ] } ] |
oder alternativ
#SET AX LINK [NBR] [ <Kopplungsgruppe>, [ <Slave>=<Master>,<zähler>, <nenner> ] {, [ <Slave>=<Master>,<zähler>, <nenner ] } ] |
<Kopplungsgruppe> | Nummer der Kopplungsgruppe (1) |
<Slave> | Achsbezeichnung oder logische Achsnummer der Slaveachse des Kopplungspaares i (2) |
<Master> | Achsbezeichnung oder logische Achsnummer der Masterachse des Kopplungspaares i (2) |
NBR | Mit dem Logikschalter NBR wird auf die Auswertung von logischen Achsnummern anstatt von Achsnamen umgeschaltet. Die Achskopplungen müssen dann über die logischen Achsnummern definiert werden. Die Achsen müssen noch nicht im Kanal vorhanden sein. Erst bei der Aktivierung der Koppelgruppe wird ihr Vorhandensein geprüft! |
<zähler>, <nenner> | Ganzzahlen. Dienen zur Berechnung eines Kopplungsfaktors zwischen Master- und Slaveachse. Für den resultierenden Kopplungsfaktor gilt: -1 : Spiegelungskopplung. 1 : Standardkopplung; ist äquivalent zur bisherigen Syntax. 0 : Ausgabe einer Fehlermeldung. |
Achtung
Faktoren, die eine reine Skalierung (Faktor ≠ 1) bzw. Skalierungen mit gleichzeitiger Spiegelung (Faktor ≠ -1) bewirken, sind momentan nicht zulässig. Es wird eine Warning ausgegeben und die Kopplung wird als Standardkopplung behandelt. D.h., es sind nur die Kopplungsfaktoren 1 und –1 zulässig (siehe Beispiele)
(1) 1 ... [Max. Anzahl Kopplungsgruppen–1], siehe [6] -2.11
(2) Max. Anzahl Kopplungspaare, siehe [6] -2.12
Programmierbeispiel
N10 #SET AX LINK[1, [Y2 = Y1,1,-1]] | Spiegelungskopplung (Faktor –1) |
N20 #SET AX LINK[1, [Y2 = Y1,-1,1]] | Spiegelungskopplung (Faktor –1) |
N30 #SET AX LINK[1, [Y2 = Y1,-2,2]] | Spiegelungskopplung (Faktor –1) |
N40 #SET AX LINK[1, [Y2 = Y1,1,1]] | Standardkopplung |
N50 #SET AX LINK[1, [Y2 = Y1,2,2]] | Standardkopplung |
N60 #SET AX LINK[1, [Y2 = Y1,0,1]] | Fehlermeldung, Programmabbruch |
N70 #SET AX LINK[1, [Y2 = Y1,1,0]] | Fehlermeldung, Programmabbruch |
N80 #SET AX LINK[1, [Y2 = Y1,1,2]] | Warning (Faktor 0.5), Standardkpl. |
N90 #SET AX LINK[1, [Y2 = Y1,2,3]] | Warning(Faktor 0.666), Standardkpl. |
N100 #SET AX LINK[1, [Y2 = Y1,3,2]] | Warning (Faktor 1.5), Standardkpl. |
N110 #SET AX LINK[1, [Y2 = Y1,-1,2]] | Warning (Faktor –0.5), Standardkpl. |
N120 #SET AX LINK[1, [Y2 = Y1,-3,2]] | Warning(Faktor –1.5), Standardkpl. |
oder alternativ | |
N40 #AX LINK[1, [Y2 = Y1,1,1]] | Standardkopplung |
N50 #AX LINK NBR[1, [8 = 2,2,2]] | Standardkoppl. über log. Achsnummern |