Einstellungen für die dynamische kv-Anpassung (getriebe[i].dyn_kv.*)
Durch die dynamische kv-Anpassung kann die Verstärkung des Lagereglers in Abhängigkeit von der Achsgeschwindigkeit verändert werden.
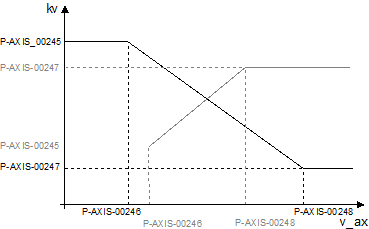
Hierbei wird die gewünschte Lagereglerverstärkung für zwei Achsgeschwindigkeiten angegeben. Zwischen den beiden Geschwindigkeiten wird die Lagereglerverstärkung linear interpoliert. Im folgenden Bild sind mögliche Verläufe der Lagereglerverstärkung dargestellt.
Hinweis

Die geschwindigkeitsabhängige kv-Anpassung ist bei SERCOS- und CANopen Antrieben nur in der Betriebsart CNC-Lageregelung ( P-AXIS-00320 = CNC_POSITION_CONTROL) möglich.