“DIRECT" mode
“DIRECT" mode (P-AXIS-00753) only uses direct measured values to dampen vibrations; the vibrations to be damped (P-AXIS-00751) must therefore be contained in the actual values.
The figure below shows the extension of the PPI cascade rule for “DIRECT" mode:
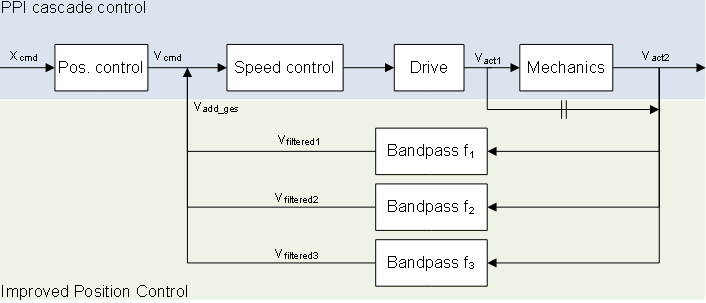
Ideally, frequencies to be damped are included in speed values from vist2 and are recorded by a direct measuring system. The measured frequency range is reduced to the relevant frequency by using a suitable band-pass filter. After scaling the results, an additional additive speed (vadd_ges) is added to the manipulated variable of the position controller (vsoll) This results in a counter-motion of the motor to compensate for a particular vibration.
If no direct measuring system is installed, the actual values of the motor (vist1) can be used as an alternative, provided the vibration is visible in the actual speed of the motor encoder (vist1).
Attention
Excessive scaling of the additive speed may cause the motor to vibrate.
Consequence: The control loop becomes unstable.