Polynomial contouring (G61/G261/G260)
Syntax: | ||
G61 | Polynomial contouring (at block end) | non-modal |
... or for polynomial contouring across several blocks: | ||
G261 | Selecting polynomial contouring (at block end) | modal |
G260 | Deselecting polynomial contouring | modal |
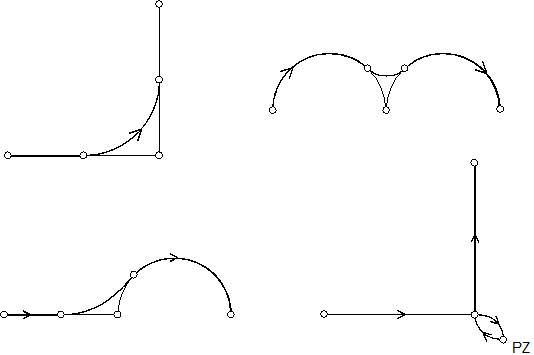
Polynomial contouring is the constant curvature and constant direction connection between two motion blocks. For this purpose, the originally programmed motion blocks are shortened. A contouring curve is added between the blocks. This process permits contouring between the transitions straight line - straight line, straight line - circle and circle – circle (see Figure below). It is not restricted to a particular plane but allows contouring between any number of curves located in space.
Motion blocks without motion path are not considered here. (See Relevant block length ).
The following contouring types are available:
- Contouring with corner deviation
- Dynamic optimised contouring
- Dynamic optimised contouring with master axis
- Contouring with interim point
- Dynamically optimised contouring of the contour.
Depending on the contouring type, different conditions may be specified. The parameters remain valid until the contouring process is fully executed. If the contouring parameters between the pre-block and post-block are changed, the change becomes effective with the next contouring operation.
For more information, see section Polynomial contouring for long blocks (G61/G261/G260).