Example 1
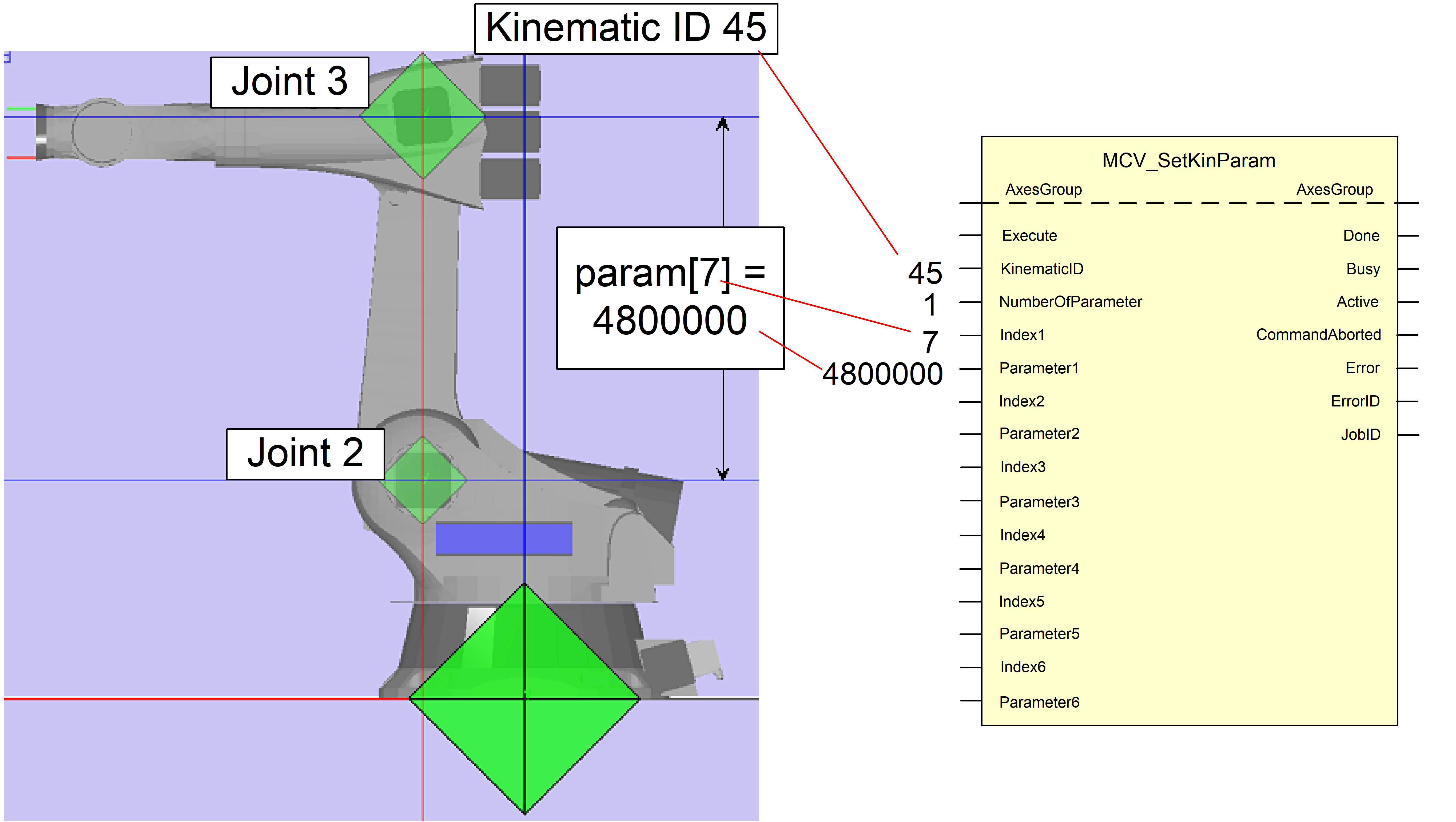
The graphic below shows that param[7] of the kinematic transformation with ID=45 (articulated robot with 6 machine axes) is the length of the robot arm between joints 2 and 3 and how this information can be transferred to the motion controller via MCV_SetKinParam.