MC_GrpStop
The function block leads to a controlled motion stop. It aborts every ongoing command by other motion FBs.
The axis group changes to the “GroupStopping” state until velocity 0 is reached. If the “Done” and “Execute” outputs are set to FALSE, the axis group state changes to “GroupStandby”. The function block is not interruptible.
Block diagram
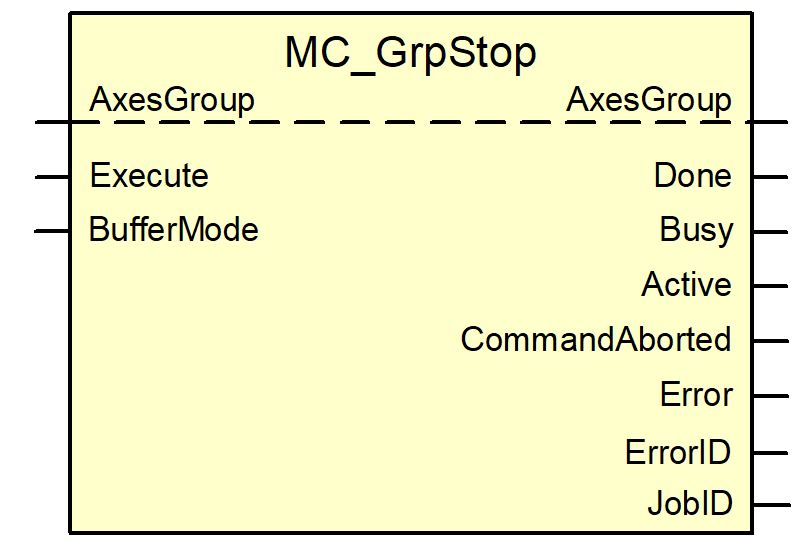
FB parameters
VAR_IN_OUT | ||
Variable name | Data type | Description |
AxesGroup | AXES_GROUP_REF | Axis group reference |
VAR_INPUT | ||
Variable name | Data type | Description |
Execute | BOOL | Starts the command on the rising edge. |
BufferMode | MC_BUFFER_MODE | The input defines when a job is activated provided that other jobs are already active when the FB is commanded or are waiting for execution. The following modes are supported: mcAborting = 0 mcBuffered = 1 |
VAR_OUTPUT | ||
Variable name | Data type | Description |
Done | BOOL | TRUE indicates that 0 velocity was reached. The axes are at standstill. |
Busy | BOOL | TRUE indicates that the function block is executing a job. |
Active | BOOL | The command is not yet completed. |
CommandAborted | BOOL | The command to stop was aborted by another job. |
Error | BOOL | TRUE indicates that an error occurred. |
ErrorID | WORD | Error code |
JobID | UDINT | Ordinal number of the last job sent by the FB. |