Transition mode: TMDynamicOptimized
This transition mode optimises the axis-specific acceleration and jerk. No geometric path is calculated.
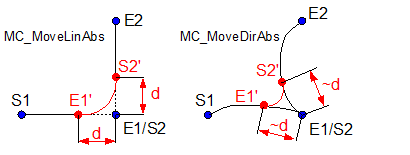
The only parameter that must be specified when this transition mode is used defines the distance from the point where the transition starts up to the corner point of the successive motions. This is also the distance from the corner point to the point where the transition motion should end. The distance d can be interpreted as the radius of a ball with the corner point E1/E2 as its centre point. Outside this ball, the tool centre point follows the programmed path. The transition takes place inside the ball.
This transition mode is recommended for point-to-point (PTP) motions (MC_MoveDirAbs).
Transition parameters | Description |
TransitionParameter[0] | The distance (d) is from the point where the programmed path is left up to the corner point of the successive motions. If this transition mode is used in conjunction with an MC_MoveDirAbs FB and a robot (PTP motions), the distance d is not exactly the distance between E1’ and E1 or between S2 and S2’. |