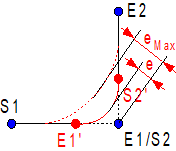
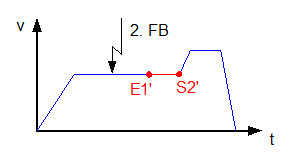
Transition mode: TMMaxCornerDeviation
With this transition mode the distances by which the motions of two successive function blocks are shortened are automatically determined based on geometric calculations. The boundary condition for the calculation is that the calculated deviation of the transition curve is not greater than the maximum specified deviation.
The motion velocity on the transition curve is the velocity of the first of two successive function blocks. Due to the curvature of the transition curve and the maximum permitted acceleration of the axes involved in the motion, it may happen that the specified velocity is not reached.
If it is possible to maintain the velocity of the previous function block on the transition curve, the actual corner deviation is smaller than the specified maximum permitted corner deviation.
|
|
Transition parameters | Description |
TransitionParameter[0] | If the maximum permitted corner deviation is (eMax); the shortest distance between the corner point of the path motion and the new calculated transition curve. |