Transition mode: TMCornerDistance
Once it is known where the programmed path can be left with two successive function blocks and when this path can be resumed, the user can explicitly specify the distance between these two points and the original corner point of the programmed path for this transition mode. The original motion jobs can then be shortened by these distances.
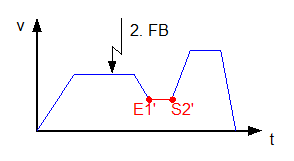
The motion velocity on the transition curve is the velocity of the first of two successive function blocks. Due to the curvature of the transition curve and the maximum permitted acceleration of the axes involved in the motion, it may happen that the specified velocity is not reached.
|
|
Transition parameters | Description |
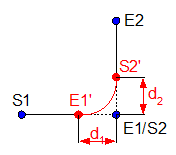
TransitionParameter[0] | This parameter defines the point at which the programmed path can be left. It is specified as the distance (d1) to the corner at which the following motion starts. |
TransitionParameter[1] | This parameter defines the point at which the programmed path can be resumed. It is specified as the distance (d2) between the point at which the following motion starts and the return point. |