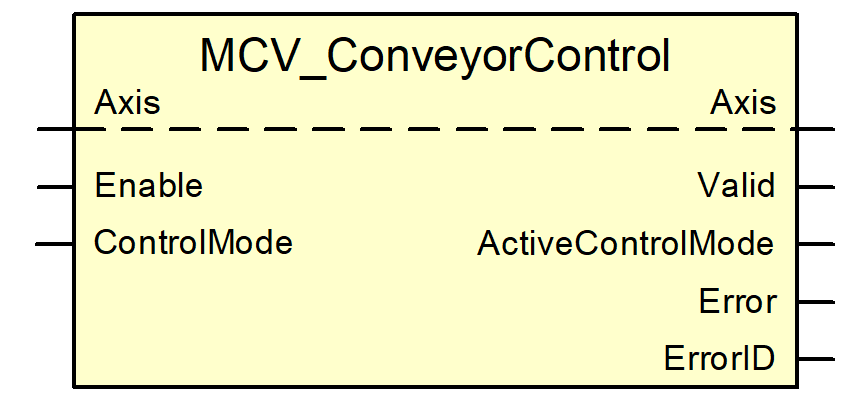
MCV_ConveyorControl
The “MCV_ConveyorControl” FB signals the dynamic state of an axis to the motion controller when the axis is not subject to its control. This axis is parameterised as an encoder axis (see P-AXIS-00015).
This information influences the synchronisation motion of an axis group for which this encoder axis was parameterised as a master axis.
Block diagram
FB parameters
VAR_IN_OUT | |||
Variable name | Data type | Description | |
Axis | AXIS_REF | Axis reference | |
VAR_INPUT | |||
Variable name | Data type | Description | |
Enable | BOOL | TRUE, dynamic state of the encoder axis is sent to the motion controller. | |
ControlMode | UDINT | Value | Constant |
0 | HLI_CONVEYOR_SPEED_CONST | ||
1 | HLI_CONVEYOR_DECELERATION | ||
2 | HLI_CONVEYOR_DECELERATION | ||
3 | HLI_CONVEYOR_SPEED_ZERO | ||
4 | HLI_CONVEYOR_MACH_WITH_SPEED_ZERO | ||
VAR_OUTPUT | |||
Variable name | Data type | Description | |
Valid | BOOL | TRUE, value at the “ActiveControlMode” output is valid. | |
ActiveControlMode | UDINT | Current dynamic state of the encoder axis which was signalled to the motion controller. | |
Error | BOOL | Indicates TRUE if an error occurs in the FB. | |
ErrorID | WORD | Error code | |
Behaviour of the FB:
- This function is not available in all motion controller variants.
- In the variants in which this function is available, the parameters of the group conv_sync must be defined in the axis parameter list ([AXIS]) and the parameters of the conveyor_sync group must be set in the channel parameter list ([CHAN]).