Definition of the motion pattern
By analogy to programming a contouring motion via DIN 66025, the interpolation type is used to define along which trajectory the specified slave position is travelled to in the direction of ascending master positions.
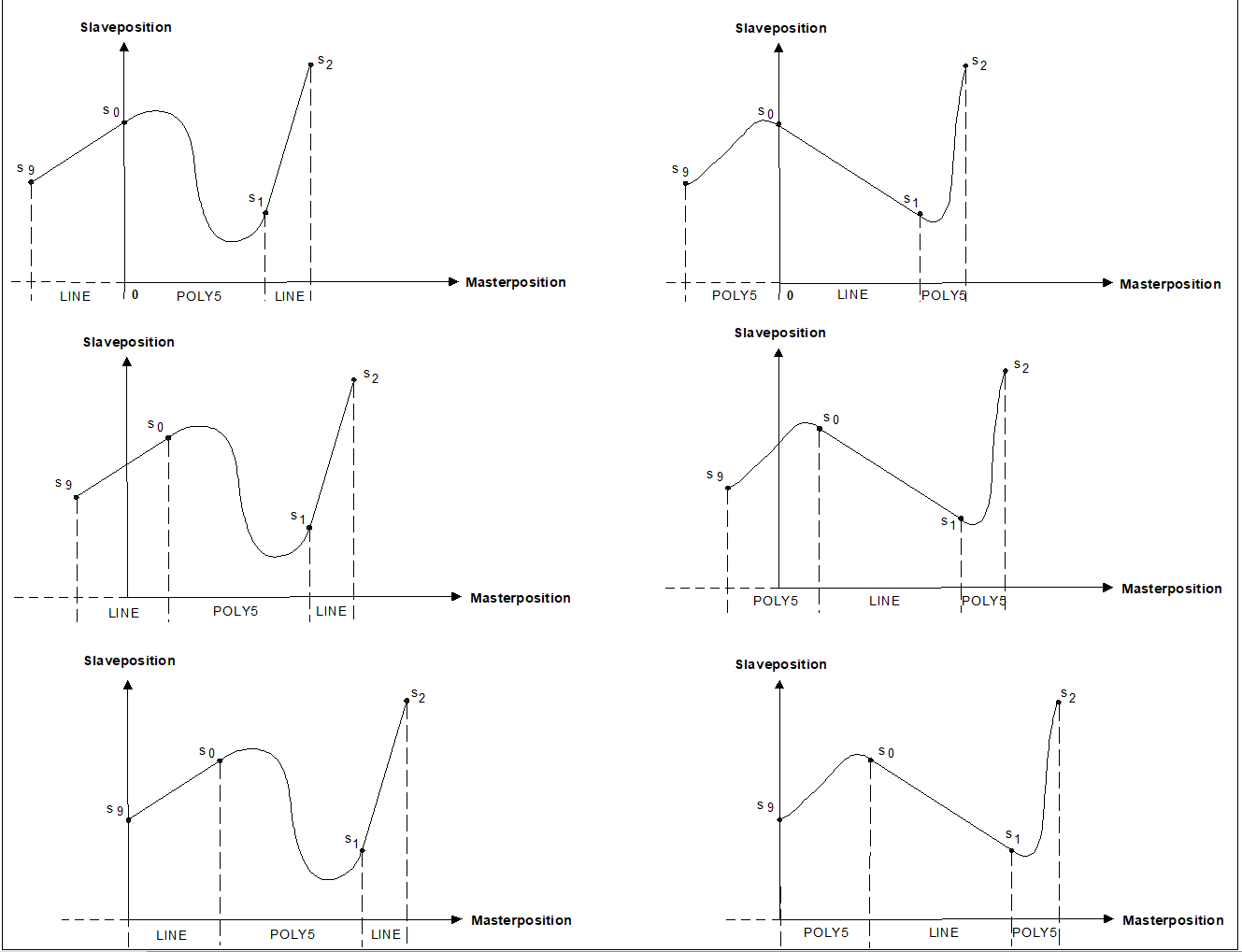
Accordingly, the POLY5-LINE interpolation type defines that the first table point is travelled to via a polynomial and thus the first interval in the table is covered with constant speed.
In the case of the LINE-POLY5 type, the first slave position is accordingly travelled to at constant speed and there is a polynomial in the first interval. The figure below shows which patterns may result from LINE-POLY5 and POLY5-LINE sequences due to the position of the first interpolation point in the table.