Using rtconf.lis
The RT configuration list is used whenever the Windows operating system is run on a joint platform with a thread-based real-time operating system (such as VxWorks or RTX).
Scheduling with the following features can be parameterised using the parameters of rtconf.lis:
- Scalable scheduling for efficient use of CPU performance.
- Fixed specified CPU sharing between Windows and real-time operating system
- Call frequency of each thread per cycle
- Reduction of a thread's call frequency (modulo cycle time).
- Integration of external threads (e.g. of a PLC runtime system)
The following figure shows scheduling with an external interrupt and an internal timer interrupt for control of the individual threads' computing time.
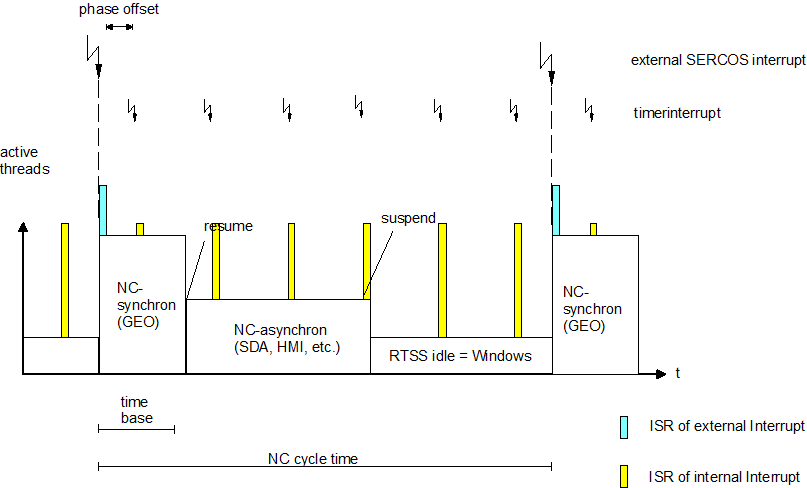
After the external interrupt, all threads participating in scheduling are set to the ready for execution state. Then, the order of execution of the threads depends solely on their priority. This is also parameterised in the RT configuration list. As a rule, the synchronous NC execution part (GEO) has the highest priority and is therefore executed first. This is followed by the asynchronous thread, consisting for example of the function calls for control data processing (SDA), HMI and system sequential control.
The functions of the asynchronous thread are called in a loop the same number of times as parameterised in the RT configuration list. There is, however, an upper limit for the execution time of the asynchronous thread. This is monitored by higher resolution timer interrupts. In other words, the asynchronous thread is stopped as required so that Windows can receive the parameterised computing time (also in rtconf.lis).