Anwendungsbeispiel
Das folgende Beispiel zeigt das Ergebnis sowie die Parametrierung der Funktion „Improved Position Control“ bei der Anwendung auf einem Zahnstangen-Ritzel-Antrieb.
Für Versuchszwecke wurde die Achse vor- und zurückgefahren und Schwingungen mit einem Beschleunigungssensor aufgezeichnet.
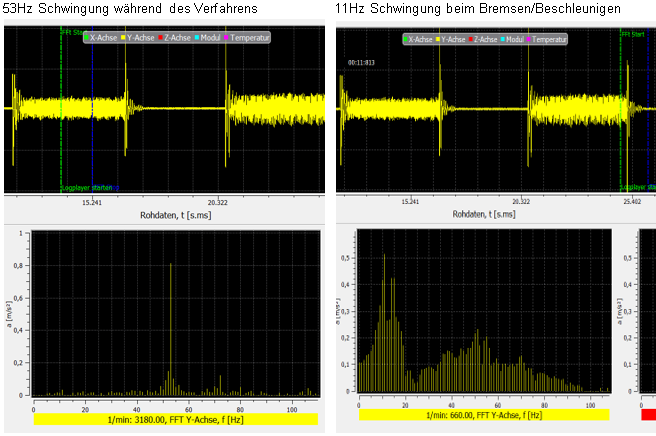
Die obige Abbildung zeigt im oberen Teil den aufgezeichneten Zeitbereich und im unteren Teil den Frequenzbereich.
Die Achse zeigt während des Verfahrens eine dominante Schwingung bei einer Frequenz von 53Hz sowie beim Bremsen/Beschleunigen eine dominante Schwingung bei 11Hz. Durch die Funktion „Improved Position Control“ sollen beide Frequenzen gedämpft werden.
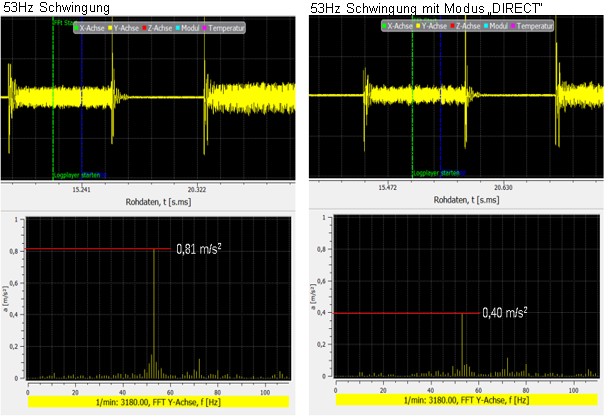
Obige Abbildung zeigt die Dämpfung der Schwingung bei 53Hz. Durch optimale Parametrierung des Modus „DIRECT“ kann die Amplitude von 0,81m/s2 auf 0,40 m/s2 gedämpft werden.
Gleichzeitig wird die Schwingung bei 11 Hz mit dem Modus „INDIRECT“ gedämpft:
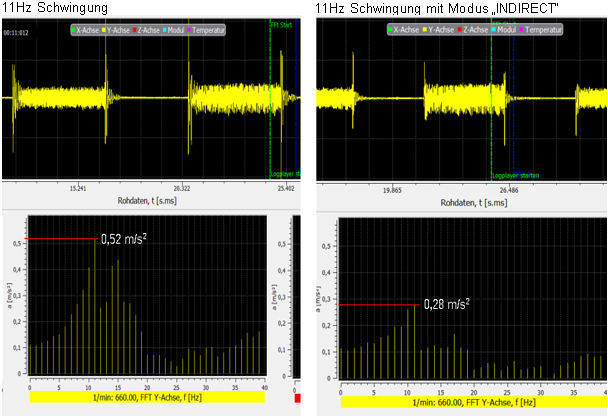
Auch bei dieser Frequenz kann durch optimale Parametrierung eine Dämpfung der Amplitude von 0,52 m/s2 auf 0,28 m/s2 erzielt werden.
Verwendete Parametrierung
lr_param.improved_position_control.enable TRUE
lr_param.improved_position_control.v_add_max_fact 1000
lr_param.improved_position_control.stage[0].mode DIRECT
lr_param.improved_position_control.stage[0].filter.order 2
lr_param.improved_position_control.stage[0].filter.fg_f0 53
lr_param.improved_position_control.stage[0].filter.q_factor 10
lr_param.improved_position_control.stage[0].filter.damping 0.9
lr_param.improved_position_control.stage[0].weight_fact_num 100
lr_param.improved_position_control.stage[0].weight_fact_denom 200
lr_param.improved_position_control.stage[1].mode INDIRECT
lr_param.improved_position_control.stage[1].filter.order 2
lr_param.improved_position_control.stage[1].filter.fg_f0 90
lr_param.improved_position_control.stage[1].filter.q_factor 10
lr_param.improved_position_control.stage[1].filter.damping 0.5
lr_param.improved_position_control.stage[1].weight_fact_num 100
lr_param.improved_position_control.stage[1].weight_fact_denom 200
lr_param.improved_position_control.stage[2].mode NOT_ACTIVE
lr_param.improved_position_control.stage[2].filter.order 2
lr_param.improved_position_control.stage[2].filter.fg_f0 90
lr_param.improved_position_control.stage[2].filter.q_factor 10
lr_param.improved_position_control.stage[2].filter.damping 0.4
lr_param.improved_position_control.stage[2].weight_fact_num 100
lr_param.improved_position_control.stage[2].weight_fact_denom 200
Vorgehensweise beispielhaft erklärt
Um die möglichst perfekte Parametrierung für eine Frequenz zu finden, werden zunächst die Modi für die Frequenzen separat aktiviert und betrachtet.
Für die Frequenz bei 53 Hz wird der Modus „DIRECT“ gewählt, da die Frequenz eindeutig in den Istwerten des Antriebs zu sehen ist. Aufgrund der hohen Frequenz kann der Gütefaktor entsprechend angezogen werden. Ein Gütefaktor von 10 entspricht bei dieser Frequenz einer Bandbreite von 5,3Hz. Anschließend wird der Gewichtungsfaktor sukzessive erhöht, bis sich das Ergebnis wieder verschlechtert.
Nach dem gleichen Prinzip werden die Parameter für die Frequenz bei 11Hz ermittelt. Hier wird der Modus „INDIRECT“ verwendet, um die Frequenz von den umliegenden Frequenzen separieren zu können. Für diesen Modus muss zusätzliche eine Dämpfung eingestellt werden. Um die optimale Dämpfung zu bestimmen, besteht die Möglichkeit, die Dämpfung der Schwingung aus dem Zeitbereich der Aufzeichnung zu errechnen. Alternativ kann das Verhalten der Funktion „Improved Position Control“ bei sukzessivem Absenken der Dämpfung betrachtet werden.
Zuletzt werden beide Frequenzen gleichzeitig aktiviert und überprüft ob sich die beiden Stufen gegenseitig beeinflussen. Da beide Frequenzen in diesem Beispiel relativ weit auseinander liegen, ist keine Beeinflussung zu erkennen.