Beispiel: Terminal-Spindel mit Getriebe
Eine Spindel wird über eine DA-Wandlerklemme KL4032 angesteuert, eine Spannung von 10V am Eingang des Antriebsreglers entspricht einer Motordrehzahl von 9000 U/min, am Motor ist ein Getriebe mit einem Übersetzungsverhältnis i=5 (5 Motorumdrehungen entsprechen einer Umdrehung am Getriebeausgang) angebaut. Bei der DA-Wanderklemme KL4032 entspricht bei der Default-Skalierung ein digitaler Ausgabewert von 32767 (0x7FFF) einer Ausgangsspannung von 10V.
Schritt 1 von3:
Der Umrechnungsfaktor zwischen Motorumdrehungen pro Minute und dem im zyklischen Telegramm übertragenen Sollwert beträgt wie im vorherigen Beispiel:
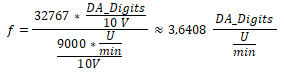
Damit sich der Spindelmotor mit einer Drehzahl von 1 U/min dreht, wäre also ein Wert von 3,6408 an den DA-Wandler auszugeben.
Schritt 2 von 3:
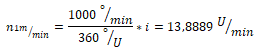
Hier macht sich nun die Verwendung eines Getriebes bemerkbar.
Um getriebeausgangseitig die Geschwindigkeit von 1000 °/min zu erreichen, ist damit eine Motordrehzahl nötig von
Schritt 3 von 3:
Mit dem Geschwindigkeitsskalierungsfaktor f ergibt sich für den auszugebenden Geschwindigkeitssollwert für 1000 °/min:

Damit ist der Wert von multi_gain:

Mögliche Werte für P-AXIS-00129 und P-AXIS-00128 wären damit:
P-AXIS-00129 | 50 | 506 | 5057 | … |
P-AXIS-00128 | 1 | 10 | 100 | ... |