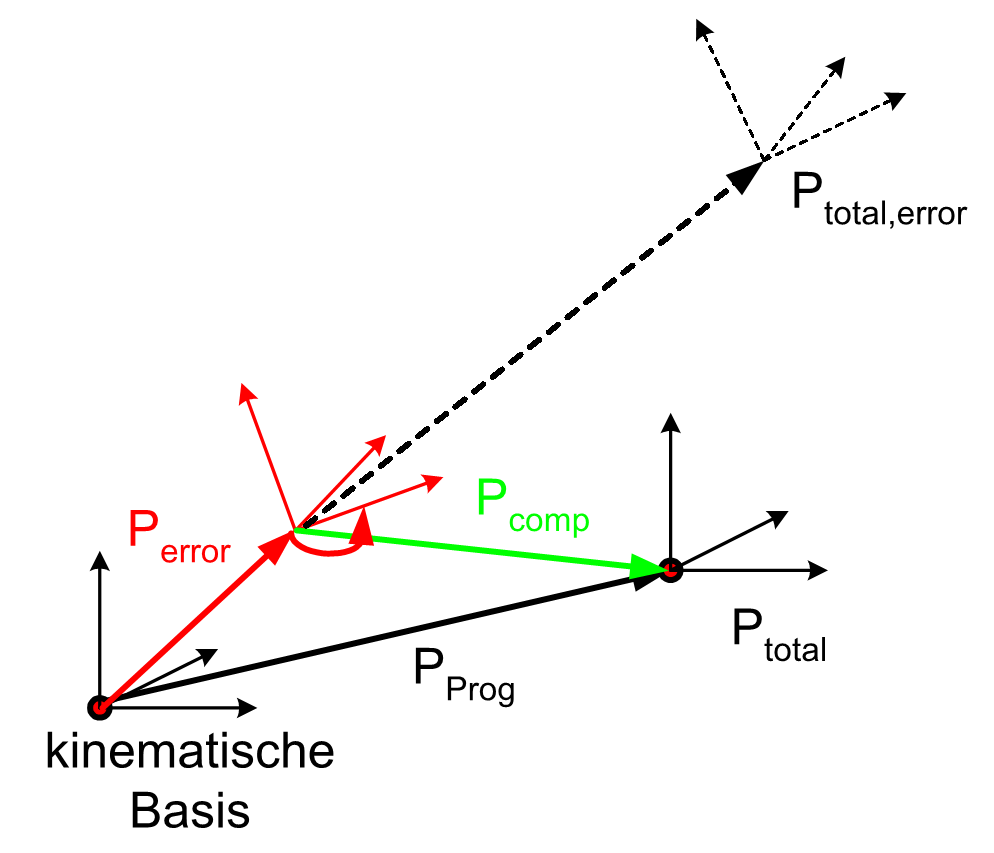
Beispiel 2: Schwankungen des Fußpunktes einer Kinematik
Reine Verschiebungen im Fußpunkt könnten auch im TCP-Werkzeugmittelpunkt durch eine inverse Verschiebung ausgeglichen werden. Kommen jedoch zusätzlich Drehungen hinzu, so lässt sich das nicht mehr einfach ausgleichen.
Die CNC kann dies jedoch durch Korrektur der Zielposition (grün) ausgleichen. Der programmierte Zielpunkt wird dann so angefahren, als wären keine Fehler im Fußpunkt eingeprägt.
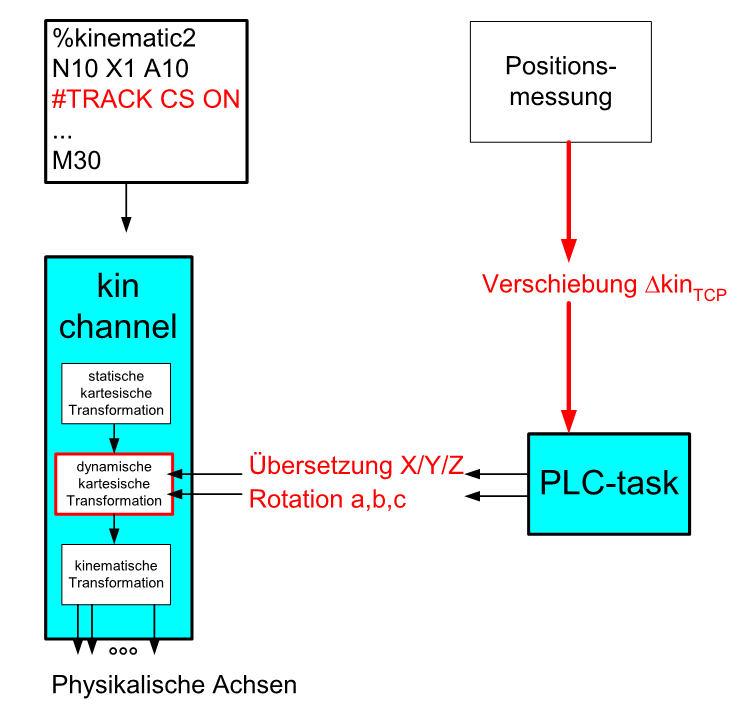
Struktur bei der Fehlerkompensation
Die Abweichung des Fusspunktes einer Kinematik wird gemessen und dann bei der Positionierung des TCP der Kinematik zur Kompensation als Fehler über das dynamische Koordinatensystem berücksichtigt.
Programmierbeispiel

Schwankungen des Fußpunktes einer Kinematik
%dynCS-agilus
…
;Fahren auf sichere Position um Kompensation abzuwählen
N1000 Z200
;Kompensiere Fehler in Fußpunkt, Fehlerausgleich durch SPS
N1010 #TRACK CS ON [ID=0 KIN_BASE OPTION=0 FILTER=1000]
N2000 Z100
;Fahren mit Fehlerkompensation
N2010 G01 X100 F100
…
;Fahren auf sichere Position um Kompensation abzuwählen
N9000 Z200
N9010 #TRACK CS OFF [WAIT]
;Fahren ohne Fehlerkompensation
N2000 G01 X100 F100
…
M30