Werkzeugorientierung (P-TOOL-00146)
P-TOOL-00146 | Werkzeugorientierung durch Angabe eines Vektors |
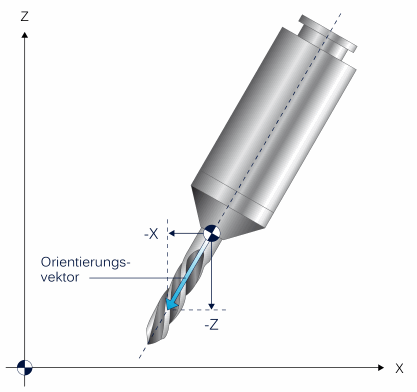
Beschreibung | Steht im 2.5D-Betrieb ein Werkzeug parallel oder in einem festen Winkel zu den Hauptachsen des Maschinenkoordinatensystems, so kann diese Ausrichtung als Vektor beschrieben werden. Ausgehend vom Einspannpunkt des Werkzeuges werden die Vektorkomponenten normiert oder unnormiert in Richtung der Werkzeugspitze definiert. Der Orientierunsvektor dient bei der Werkzeuganwahl zur Bildung der achsspezifischen Versatzanteile der Werkzeuglänge.
|
Parameter | wz[i].orientation_vector[j] mit j=0...2 |
Datentyp | REAL64 |
Datenbereich | MIN(REAL64) ≤ orientation_vector[j] ≤ MAX(REAL64) |
Dimension | ---- |
Standardwert | 0.0 |
Anmerkungen | Die Vektordefinition bezieht sich immer auf das Maschinenkoordinatensystem. Wenn der Orientierungsvektor nicht belegt ist (=0), dann erfolgt die Berücksichtigung der Werkzeuglänge nach der Standardmethode (Ebenenspezifisch, #TLAX). Parametrierbeispiel: Werkzeug T1 ist entgegen der positiven Z-Achsrichtung orientiert: wz[1].orientation_vector[0] 0 wz[1].orientation_vector[1] 0 wz[1].orientation_vector[2] -1 |