Konturverlauf mit tangentenstetigen Satzgrenzen
Beschreibung
An tangentenstetigen Satzübergängen bei
- Linear zu Zirkularsatz und umgekehrt,
- Kreis-Kreis Konturen mit Radiusänderung und
- Drehrichtungsänderung
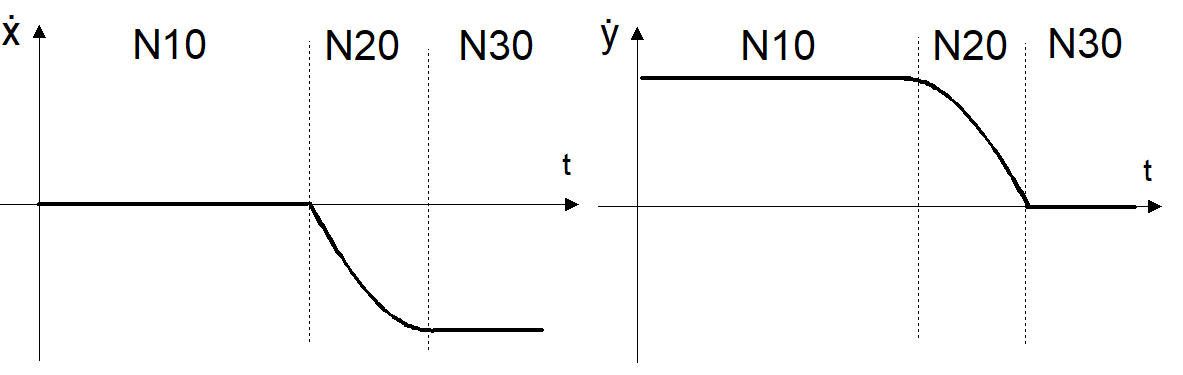
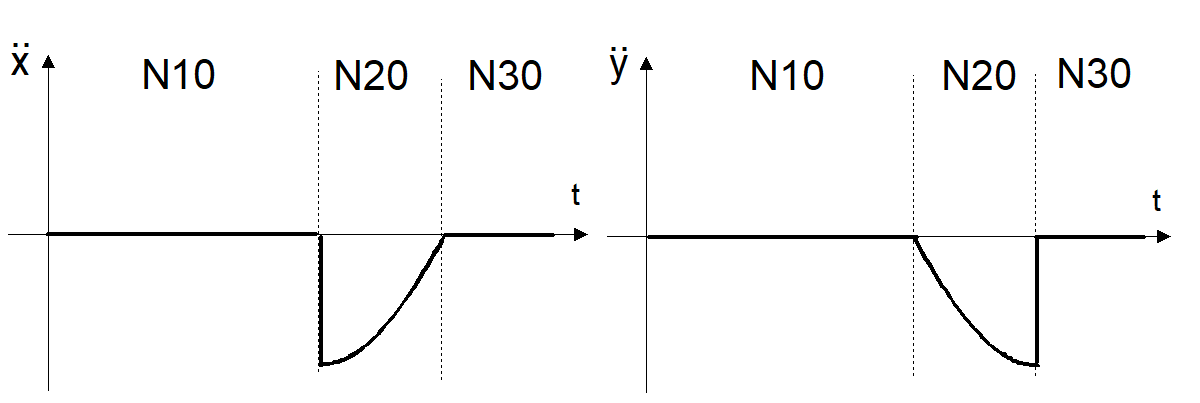
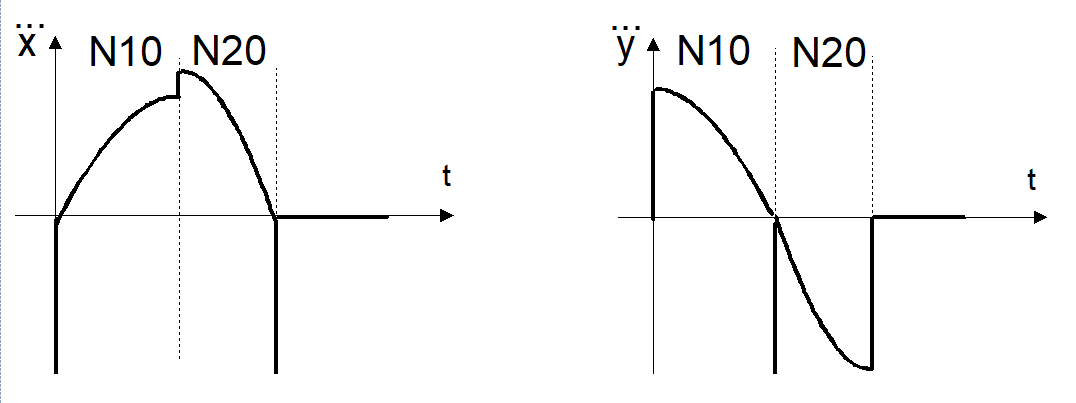
tritt ein Sprung in der Achsbeschleunigung auf. Damit verbunden ist ein relativ großer Achsruck, auch wenn die Bahngeschwindigkeit konstant ist. Im Folgenden sind einige Beispiele mit Darstellung von Geschwindigkeit, Beschleunigung und Ruck in den Achsen aufgeführt:
Beispiel

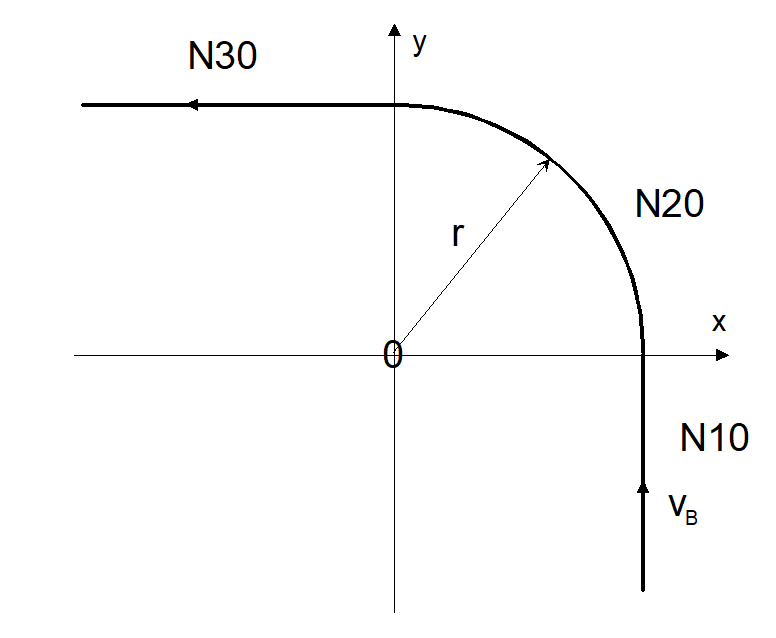
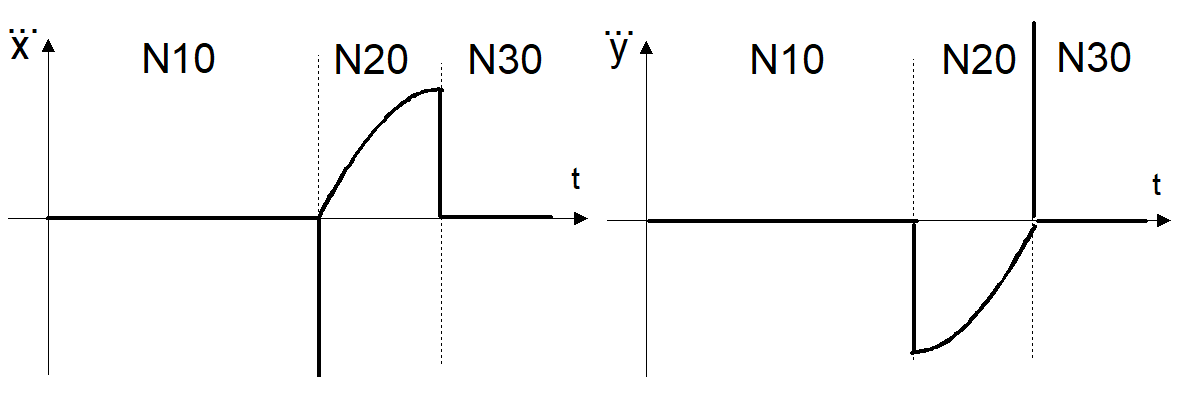
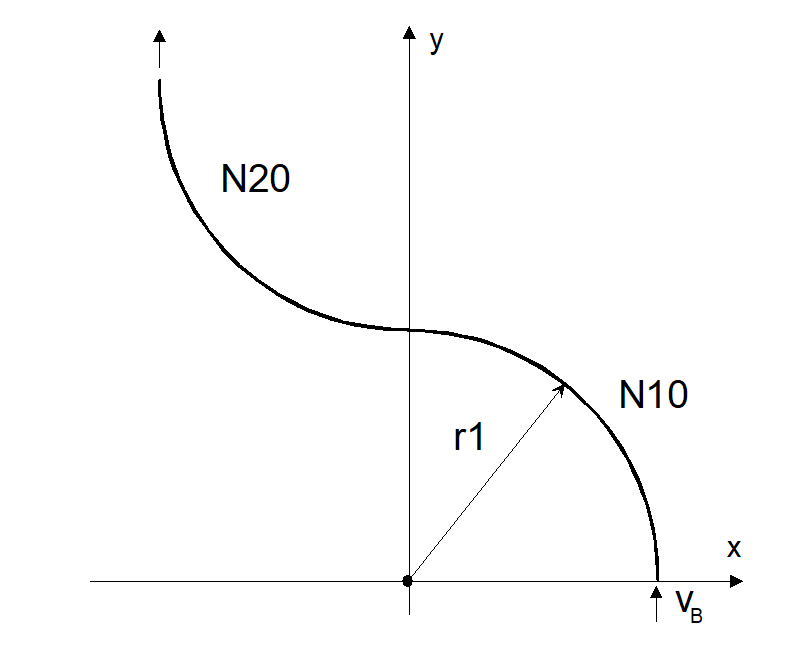
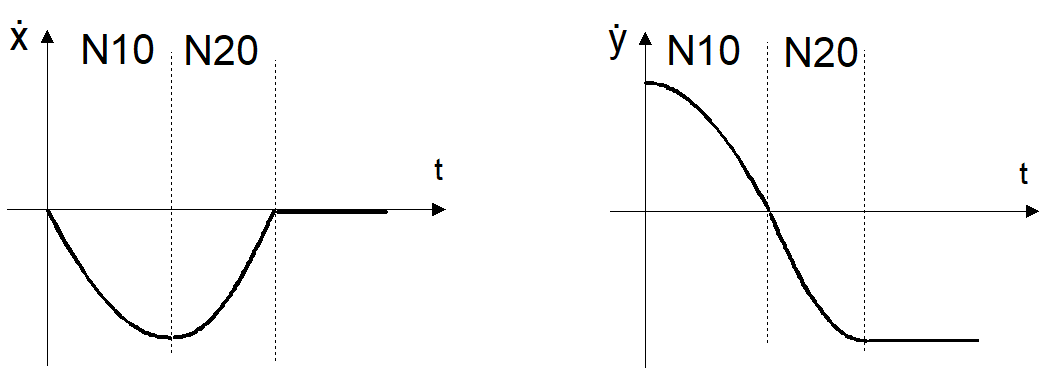
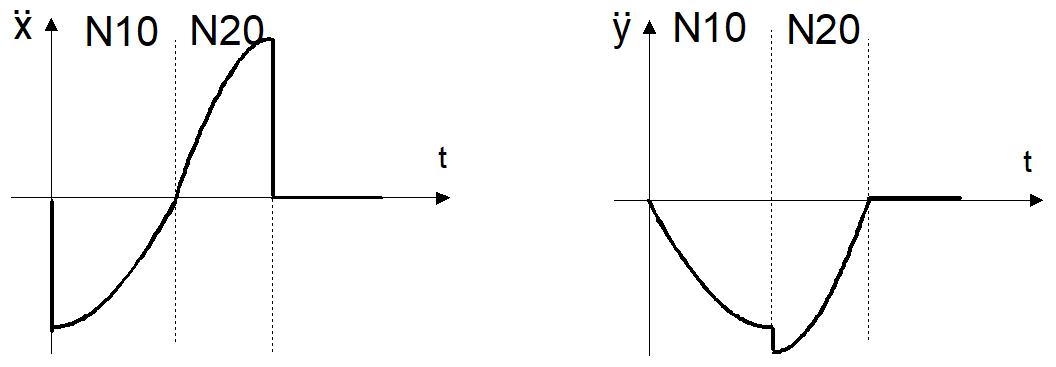
Satzübergang Linearsatz -> Zirkularsatz
Beispiel
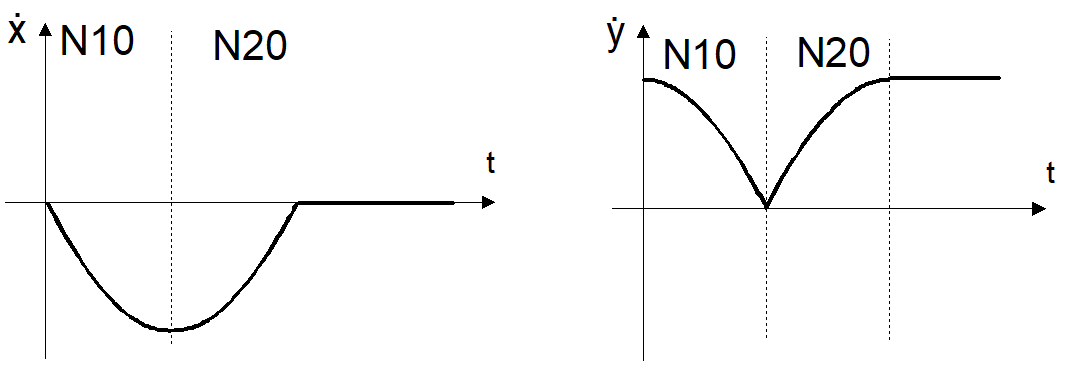
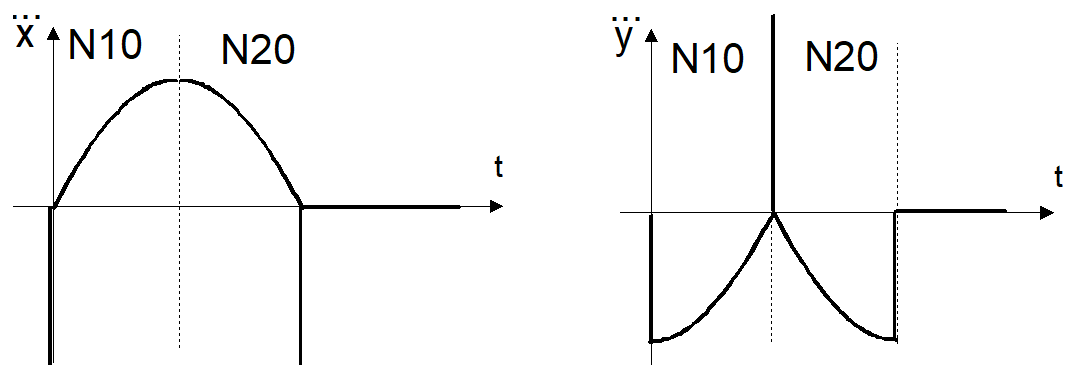
2. Satzübergang Kreis -> Kreis mit Drehrichtungsänderung G03 -> G02
Beispiel
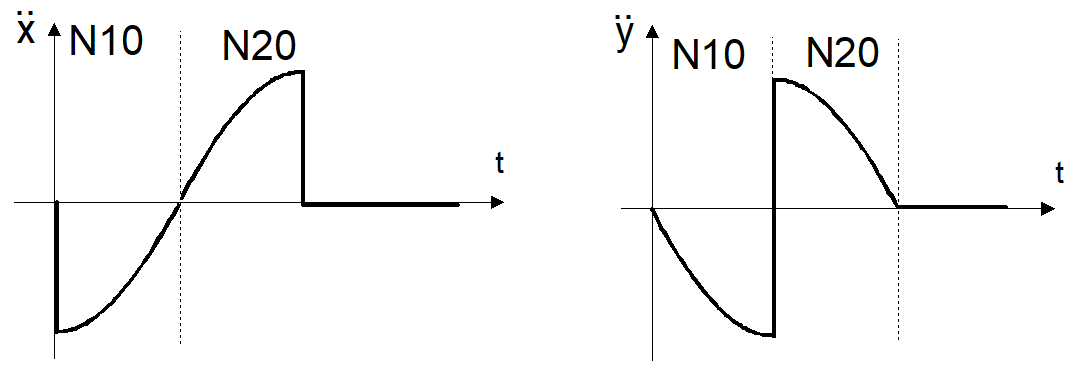
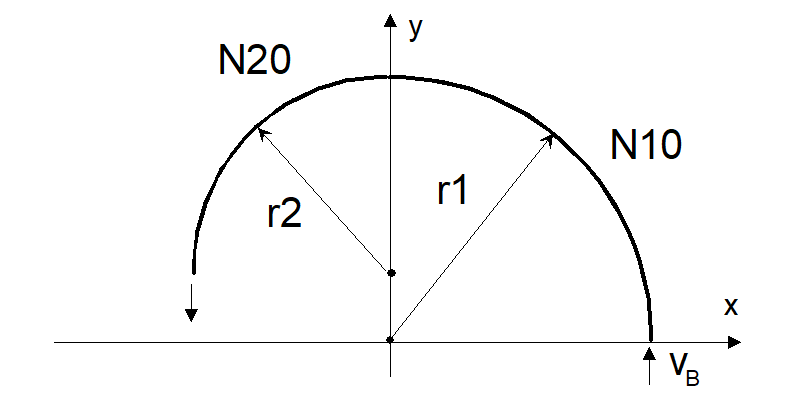
3. Satzübergang Kreis -> Kreis mit Radiusänderung r2 != r1
Parametrierung
Die Ruckbegrenzung an tangentenstetigen Satzübergängen kann über den Kanalparameter P-CHAN-00009 aktiviert bzw. deaktiviert werden.
Über den Parameter P-AXIS-00154 wird der zulässige Ruck am Satzübergang von tangentenstetigen Konturen gewichtet.
Mit dem Wert 1000 hat der Parameter den geringsten Einfluss auf die Geschwindigkeit am Satzübergang. Der Ruck ist hoch und entspricht dem Verhältnis von aktueller Beschleunigung zu Zykluszeit.
Kleinere Werte als 1000 führen zu einer weiteren Reduktion der Geschwindigkeit am Satzübergang.
Der Wert 0 führt zu einer Geschwindigkeitsreduktion, sodass der zulässige Ruck am Satzübergang entsprechend den Rampenzeitparametern P-AXIS-00195..-P-AXIS-00198 und den Beschleunigungsparametern P-AXIS-00011 und P-AXIS-00012 eingehalten wird.
| jtrans = (P-AXIS-0004 / tr)*(P-AXIS-00154) / 1000. |
Ein Wert > 0 bzw. eine eingeschränkte Ruckbegrenzung an tangentenstetigen Satzübergängen kann dann sinnvoll sein, wenn es aus technologischen Gründen unerwünscht ist, dass sich abhängig vom eingestellten Ruck an tangentenstetigen Satzübergängen ein Einbruch der Bahngeschwindigkeit ergibt. Dies ist z.B. der Fall, wenn bei der Holzbearbeitung Brandspuren durch zu langsames Fahren vermieden werden sollen.
Ein Wert < 1000 kann dann sinnvoll sein, wenn die Maschine sehr schwingungskritisch ist und es aus technologischer Sicht und im Hinblick auf die Bearbeitungszeit zulässig ist, dass die Bahngeschwindigkeit an tangentenstetigen Satzgrenzen einen relativ geringen Wert annimmt.
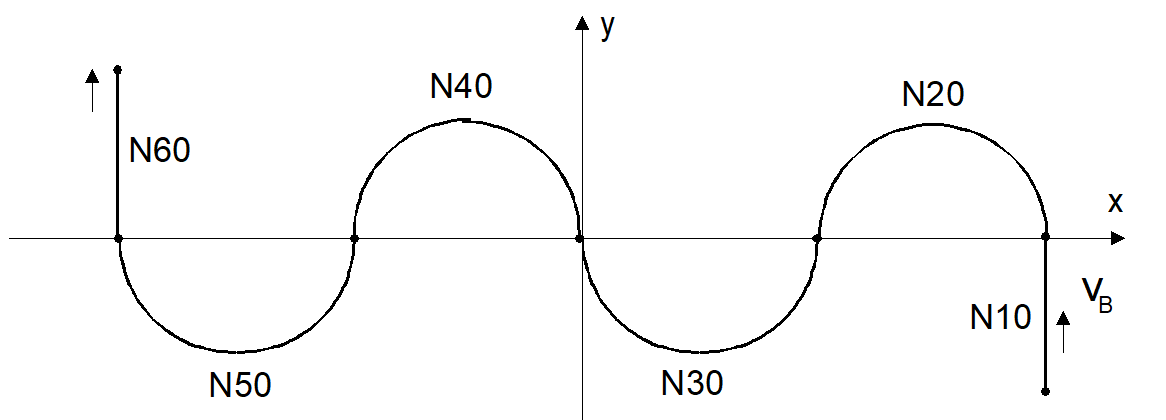
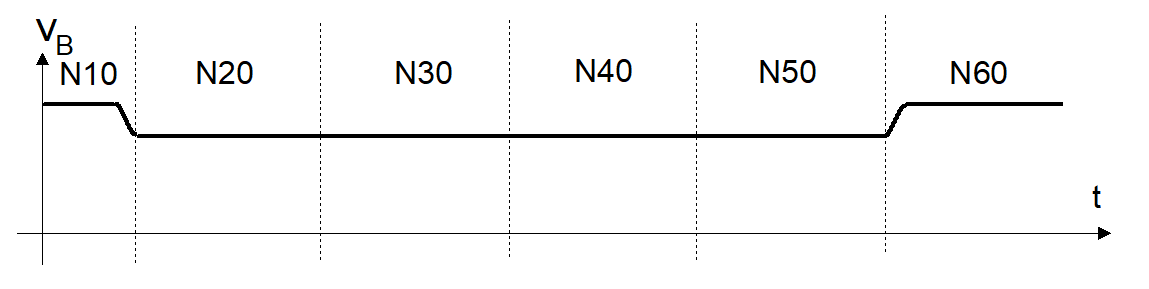
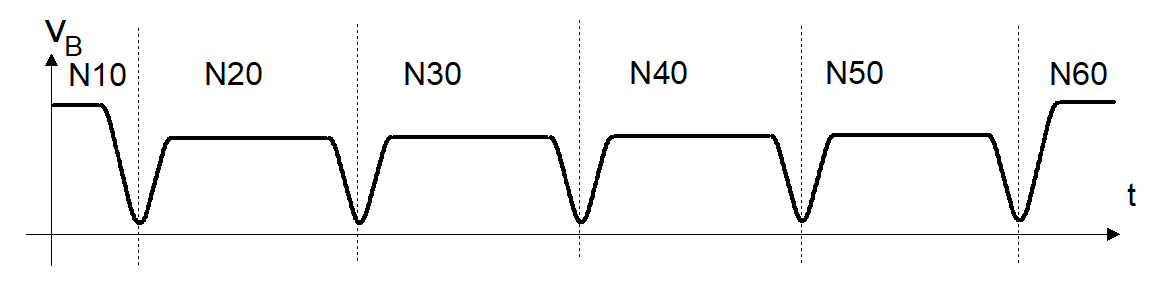
Der Einfluss der Ruckbegrenzung auf den Bahngeschwindigkeitsverlauf bei einer tangentenstetigen Kontur mit Linear- und Zirkularsätzen ist unten dargestellt. Es wird angenommen, dass die Bahngeschwindigkeit im Kreis aufgrund der zulässigen Achsbeschleunigungen reduziert wird.
Beispiel
Parametrierungsbeispiel
Ruckbegrenzung am Satzübergang:
Auszug aus der Achsparameterliste:
getriebe[0].dynamik.a_trans_weight 0
getriebe[0].dynamik.r_trans_weight 0
Auszug aus der Kanalparameterliste:
corr_v_trans_jerk 1
Keine Ruckbegrenzung am Satzübergang:
getriebe[0].dynamik.a_trans_weight 1000
getriebe[0].dynamik.r_trans_weight 1000
Hinweis

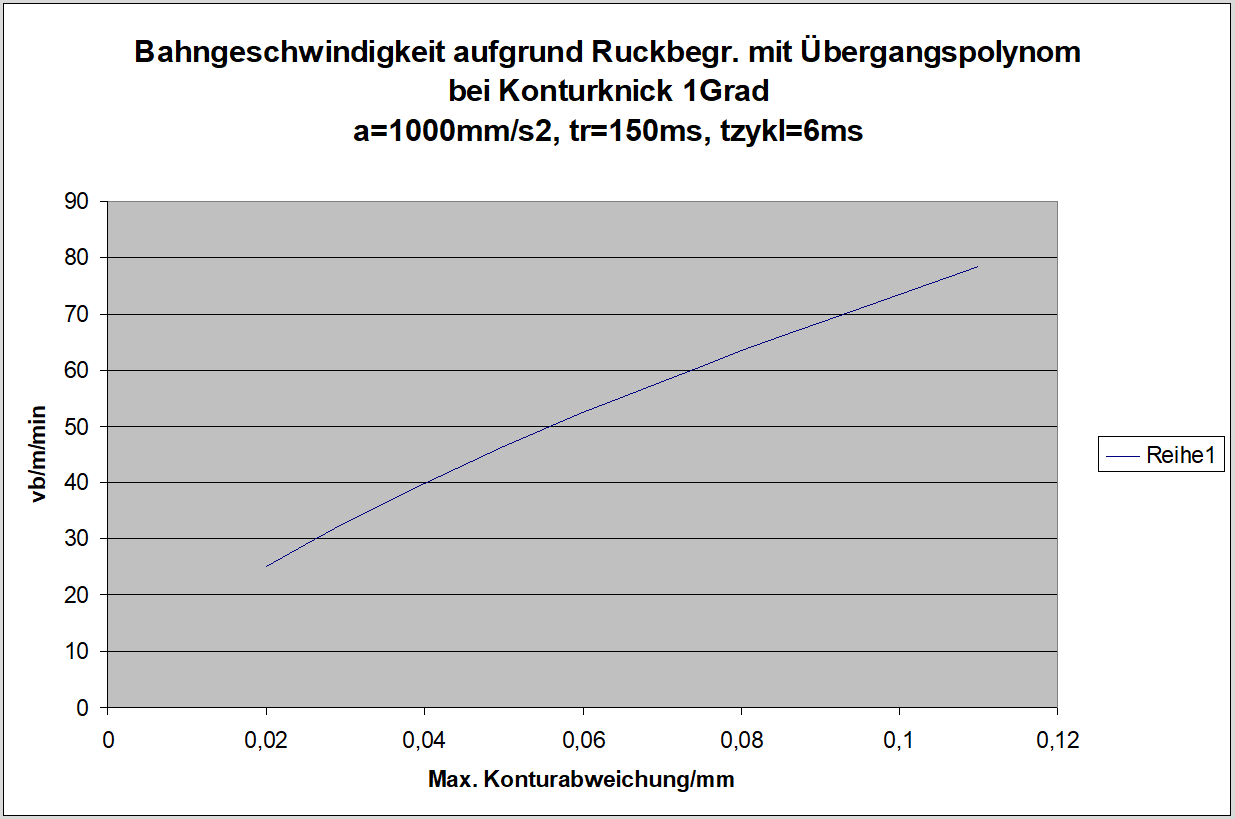
Sofern eine Sollkonturabweichung zulässig ist, kann durch Einsatz von konturbeeinflussenden Verfahren, wie z.B. dem Polynomüberschleifen im Allgemeinen, eine höhere Satzübergangsgeschwindigkeit an Konturknicken oder tangentenstetigen Übergängen mit aktiver Ruckbegrenzung gefahren werden.
Wie im Hinweis angemerkt ist im untenstehenden Diagramm anhand eines nicht tangentenstetigen Satzübergangs mit einem Knickwinkel von 1° dargestellt. Im Gegensatz zur Satzübergangsgeschwindigkeit ohne Überschleifen kann hier schon bei relativ kleinem Konturfehler mit relativ großer Bahngeschwindigkeit am Satzübergang gefahren werden.