Lifting Eigenschaften
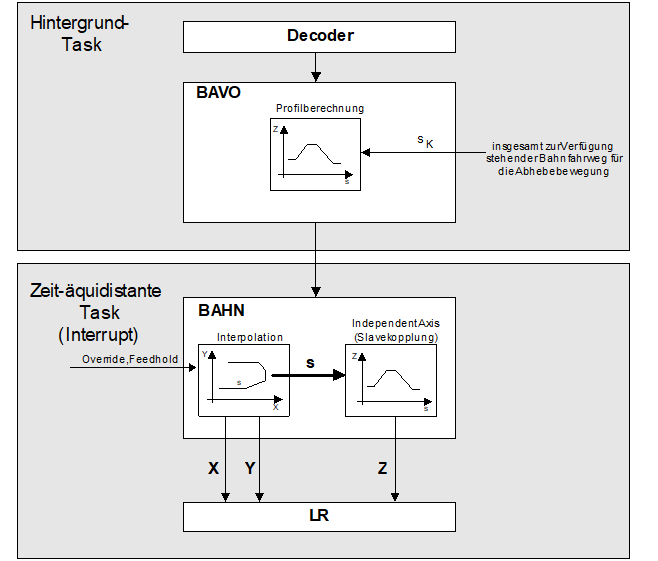
Die Liftbewegung ist bei diesem Verfahren an den Bahnfahrweg gekoppelt. D.h. wird die Geschwindigkeit der Bahn verändert, so verändert sich die LIFT-Bewegung in gleicher Art. Also ist bei gleicher Position der Bahnachsen die Position der Liftachse identisch, unabhängig von der aktuellen Geschwindigkeit. D.h. wird die Bahnbewegung angehalten (Feedhold) oder verlangsamt (Override), so stoppt die Bewegung der Liftachse entsprechend.
Innerhalb des LIFT-Bereichs wird die zulässige Beschleunigung auf der Bahn so bestimmt, dass die maximal zulässige Beschleunigung der Liftachse nicht überschritten wird.
Wartebedingungen (M-Funktionen mit Synchronisation, G04, M00, etc.) sind während des Abheben/Senkens möglich. Diese führen beim Lifting zum Unterbrechen der Bahn- und somit auch der Abhebebewegung.
Bei stark gekrümmten Kurven (Spline, Polynomüberschleifen) oder kinematischen Transformationen können die ursprünglichen Sätze für eine bessere Dynamikplanung weiter unterteilt werden. Dies führt evtl. zu einem erhöhten Satzaufkommen.
Reicht diese Satzanzahl (Look-Ahead-Bereich)
- aufgrund sehr vieler Bewegungssätze der Bahnachsen oder
- bei z.B. sehr vielen Technologiefunktionen (M-Funktionen) nicht aus,
so wird vorzeitiges Absenken vermieden. Intern wird ein LIFT_END für die programmierte Höhe und anschließend ein LIFT_START eingefügt.
Aktuell werden zwischen der Abhebe- (START) und Senkbewegung (END) eine maximale Anzahl von 20 CNC internen Sätzen (Look-Ahead-Bereich) betrachtet. Ein programmierter Bewegungssatz (G0, G1, G2, G3) erzeugt einen internen CNC-Satz. Glättungsverfahren erzeugen zusätzlich interne Sätze.
Dynamikplanung
Die Liftbewegung wird so geplant, dass bei konstanter Bahngeschwindigkeit die Liftachse mit ihrer maximalen Beschleunigung ruckbegrenzt angehoben und wieder abgesenkt wird.
Wird der Bahnvorschub während der Liftbewegung verändert (Feedhold, Override, etc.), so führt dies zur zusätzlichen Beschleunigung der Liftachse. Die Beschleunigung der Liftachse kann dadurch ihren maximalen Grenzwert kurzfristig überschreiten. Die Gesamtbeschleunigung durch die Vorschubänderung auf der Bahn und die LIFT-Bewegung selbst bleibt jedoch innerhalb des vorgegebenen Überlastbereichs. Für die Achse gilt deshalb:
|aactive| < amax * overloadfactor
wobei

Hinweis

Die Dynamikplanung der Liftachse erfordert den Slope-Typ 'TRAPEZ' ([#SLOPE [...]). Slope-Typ STEP kann zur Überlastung der Z-Achse führen.
Konturglättung und Abheben
Die LIFT-Funktion kann programmiert werden, wenn zuvor ein Glättungsverfahren aktiviert wurde (1. Fall). Die Liftachse hat beim Start und Ende der Liftbewegung die Geschwindigkeit 0. Daher wird die Glättung an diesen Stellen kurzfristig unterdrückt.
Ausnahme: Beim CONTOUR MODE (G61, G261) bewegt sich die Liftachse im Satz direkt vor dem Liften bzw. direkt nach dem Liften nicht (2. Fall).
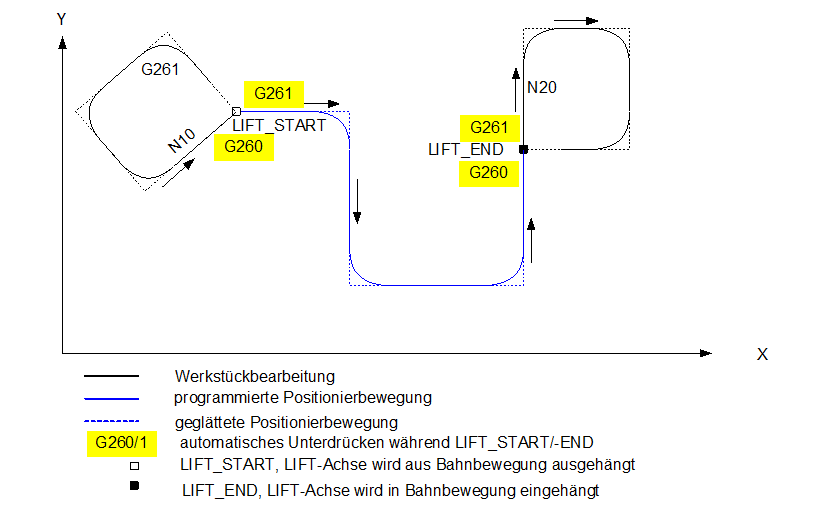
1. Fall: Bewegung der Liftachse vor/nach dem Liften
Wird die Liftachse im vor dem Liftstart (Satz N10) oder direkt nach dem Liftende bewegt (Satz N20), so wird das Überschleifen aller Achsen beim Liftstart bzw. Liftende kurzfristig unterdrückt.
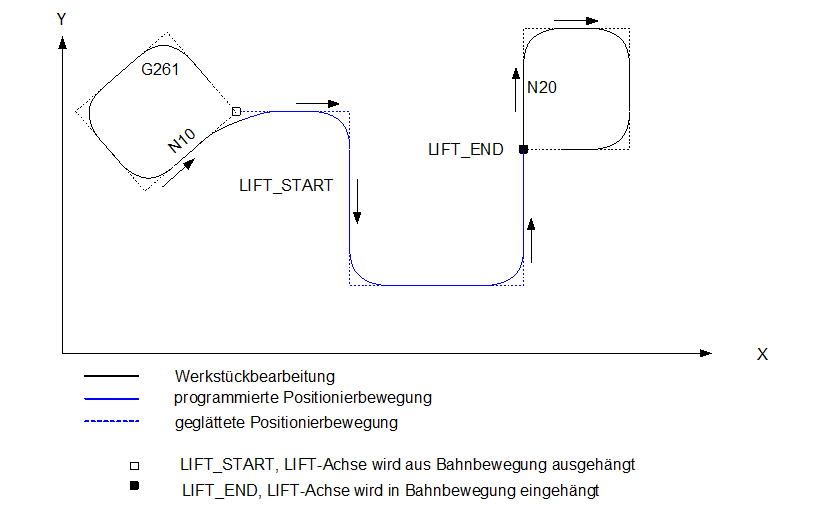
2. Fall: Kein Bewegung der Liftachse vor/nach dem Liften
Wird die Liftachse vor dem Liftstart (Satz N10) oder direkt nach dem Liftende nicht bewegt (Satz N20), so können die sonstigen Achsen überschliffen werden.
Hinweis
Zwischen LIFT_START und LIFT_END können nicht zusätzlich Glättungsverfahren an- oder abgewählt werden.