Befehl MC_Phasing
Ein MC_Phasing wird dazu benutzt, um eine Verschiebung der Slaveachse bezüglich der Masterachse zu erreichen. Dazu wird aus Sicht der Slaveachse eine Phasenverschiebung der Masterachse vorgegeben und die Slaveachse versucht durch Beschleunigung oder Verzögerung diese Verschiebung zu beseitigen. Die Bewegung wird immer ruckbegrenzt mit dem in "Jerk" eingestellten konstanten Ruck ausgeführt. Der Wert gilt sowohl für das Beschleunigen mit "Acceleration", als auch für das Bremsen mit "Deceleration".
Werden die optionalen Parameter "Acceleration", "Deceleration" und "Jerk" nicht angegeben oder ≤ 0 gesetzt, so werden die Dynamikwerte aus der entsprechenden Achsliste übernommen.
Das mechanische Analogon ist die Lösung der Kopplung von Masterachse und Slaveachse für einen begrenzten Zeitraum.
Beim Camming bewirkt dieser Befehl eine Veränderung der 'scheinbaren' Masterposition aus Sicht des Slaves. Beim Gearing wird eine Phasenverschiebung zwischen Master und Slave durch Beauftragung einer überlagerten Bewegung im Slave veranlasst. Der MC_Phasing wirkt beim Gearing somit also wie ein MC_MoveSuperImposed (in den er steuerungsintern tatsächlich umgewandelt wird).
Die Dynamikwerte: "Velocity", "Acceleration" und "Deceleration" beziehen sich beim Camming auf das Verändern der 'scheinbaren' Masterposition aus Sicht des Slaves, während sie sich beim Gearing auf die überlagerte Bewegung der Slaveachse selbst beziehen.
Optional kann auf den Abschluss des Auftrags gewartet (Schlüsselwort "WaitSyn") oder für eine spätere Synchronisierung eine Job-ID (Schlüsselwort "Id") vergeben werden.
Syntax NC-Befehl: |
<Achsname>[ MC_Phasing Master=.. PhaseShift=.. Velocity=.. |
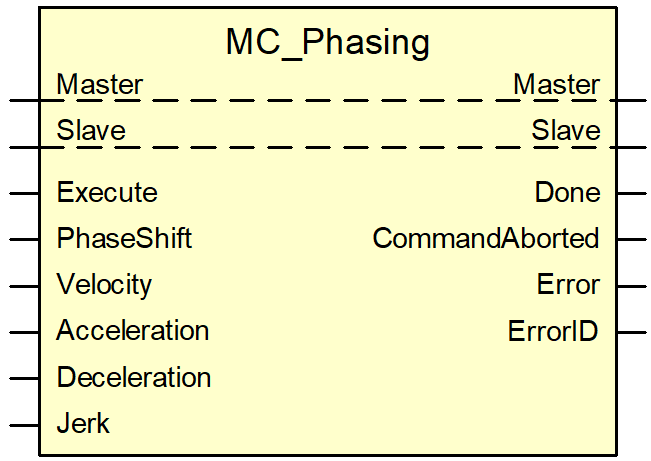
Blockdiagramm des Funktionsbausteins in PLCopen:
Eingangspin | Einheit |
|
Master | Logische Achsnummer der Masterachse | |
PhaseShift | [0,1µm or 10-4 °] | |
Velocity | [1µm/s or 10-3 °/s] | |
Acceleration | [1mm/s2 or 1°/s2] | |
Deceleration | [1mm/s2 or 1°/s2] | |
Jerk | [1mm/s3 or 1°/s3] |
Programmierbeispiel

Befehl MC_Phasing
S[MC_Phasing Master=11 PhaseShift=25 Velocity=1000 Acceleration=500 \
Deceleration=600 Jerk=20000]