Befehl MC_Stop
Der MC_Stop führt zu einem gesteuerten Bewegungshalt und führt die Achse in den Zustand 'Stopping'. Der Bewegungshalt wird immer ruckbegrenzt mit dem in "Jerk" eingestellten konstanten Ruck für den Aufbau der Bremsverzögerung ausgeführt.
Werden die optionalen Parameter "Acceleration", "Deceleration" und "Jerk" nicht angegeben oder ≤ 0 gesetzt, so werden die Dynamikwerte aus der entsprechenden Achsliste übernommen.
Der Befehl bricht jede laufende Beauftragung durch andere (SAI-)Bewegungsbefehle ab.
Optional kann auf den Abschluss des Auftrags gewartet (Schlüsselwort "WaitSyn") oder für eine spätere Synchronisierung eine Job-ID (Schlüsselwort "Id") vergeben werden.
Syntax NC-Befehl: |
<Achsname>[ MC_Stop [Deceleration=..] [Jerk=..] [Id=..] [WaitSyn] { \ } ] |
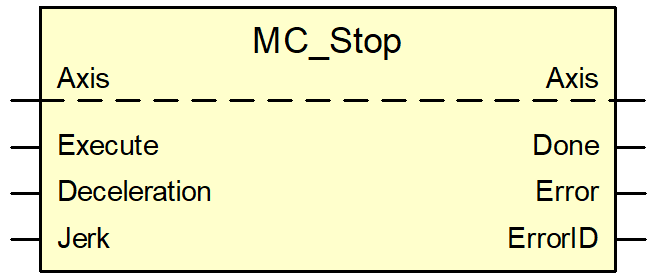
Blockdiagramm des Funktionsbausteins in PLCopen:
Eingangspin | Einheit |
|
Deceleration | [1mm/s2 or 1°/s2] | |
Jerk | [1mm/s3 or 1°/s3] |
Programmierbeispiel

Befehl MC_Stop
S[MC_Stop Deceleration=999 Jerk=25000]