Definition der Zieltangente (#AKIMA ENDVECTOR)
Versionshinweis
Ab Version V2.11.2010.02 ersetzt der Befehl #AKIMA ENDVECTOR ... den Befehl #SET ASPLINE ZIELTANG .... Dieser ist aus Kompatibilitätsgründen weiterhin verfügbar, es wird aber empfohlen, diesen in neuen NC-Programmen nicht mehr zu verwenden.
Syntax: |
#AKIMA ENDVECTOR {<Achsname>..} |
<Achsname>.. | Komponenten des Tangentenvektors, Realzahl |
Definition der Zieltangente; analog zur Definition der Starttangente.
Programmierbeispiel

Definition der Zieltangente
N10 G01 X20 Y0 F1000 (wird durch nachf. G151 zum ersten) (Stützpunkt der Spline-Kurve)
N20 #AKIMA TRANS[START=USER END=AUTO] (Übergangsart mit Vorgabe der)
(Starttangente + autom. Bestimmung)
(der Zieltangente)
N30 #AKIMA STARTVECTOR X1 Y1 Z0 (Vorgabe Starttangente)
N40 G151 (Anwahl Spline-Interpolation)
N50 G01 X40 Y20
N60 X60
N70 Y0
N80 X80
N90 Y10 (wird durch nachf. G150 zum letzten) (Stützpunkt der Spline-Kurve)
N100 G150 (Abwahl der Spline – Interpolation)
N110 X70
N120 M30
Das folgende NC-Programm liefert dasselbe Resultat, verwendet jedoch für die An- und Abwahl der Spline-Interpolation die zweite Variante.
N10 G01 X20 Y0 F1000
N20 #AKIMA TRANS[START=USER END=AUTO] (Übergangsart mit Vorgabe der)
(Starttangente + autom. Bestimmung)
(der Zieltangente)
N30 #AKIMA STARTVECTOR X1 Y1 Z0 (Vorgabe Starttangente)
N40 G151 G01 X40 Y20 (Anwahl Spline-Interpolation)
N50 X60
N60 Y0
N70 X80
N80 Y10
N90 G150 X70 (Abwahl der Spline – Interpolation)
N100 M30
Das folgende NC-Programm liefert dasselbe Resultat, verwendet jedoch für die An- und Abwahl der Spline-Interpolation die zweite Variante.
N10 G01 X20 Y0 F1000
N20 #AKIMA TRANS[START=USER END=AUTO] (Übergangsart mit Vorgabe der)
(Starttangente + autom. Bestimmung)
(der Zieltangente)
N30 #AKIMA STARTVECTOR X1 Y1 Z0 (Vorgabe Starttangente)
N40 G151 G01 X40 Y20 (Anwahl Spline-Interpolation)
N50 X60
N60 Y0
N70 X80
N80 Y10
N90 G150 X70 (Abwahl der Spline – Interpolation)
N100 M30
Achtung: Satz Nr. 80 enthält den Endpunkt des Splines!
Das Programm erzeugt folgende Kontur:
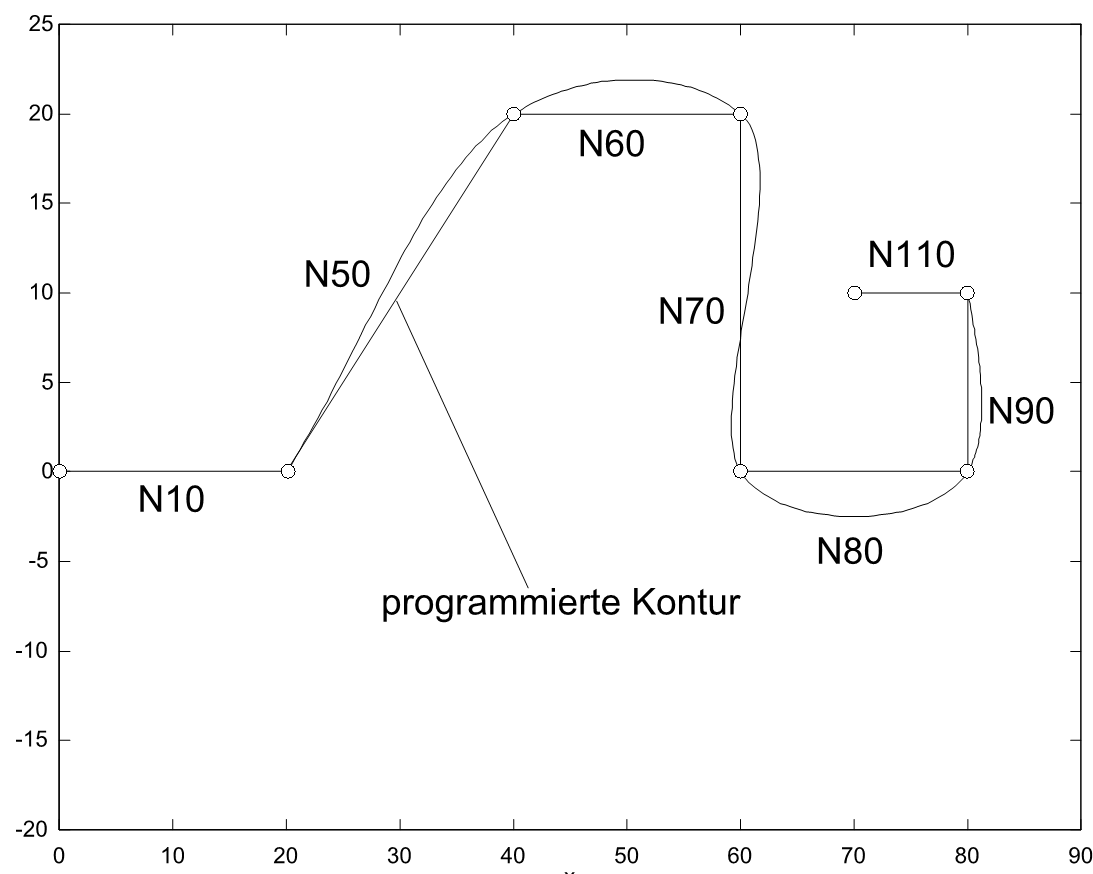
Es ist deutlich zu erkennen, dass der dem Satz N50 entsprechende Kurvenabschnitt an seinem Beginn (der dem Beginn der Spline-Kurve entspricht) die programmierte Steigung 1 aufweist. Die Steigung am Ende des Splines (Ende von Satz N90) ergibt sich automatisch.
Hinweis

Werden Zirkularsätze (G02 bzw. G03) eingefügt, so wird die Spline-Kurve vor dem Zirkularsatz unterbrochen und mit dem Eintreffen des nächsten Linearsatzes automatisch eine neue Spline-Kurve begonnen. Die Übergänge in und vom Zirkularsatz erfolgen tangential.
Die Spline-Kurve wird ebenfalls unterbrochen, wenn ein Linearsatz mit stehenden Hauptachsen und bewegten Mitschleppachsen programmiert wurde. Die Abwahl der Spline-Interpolation erfolgt mit automatischer Tangentenbestimmung am Kurvenende. Die Mitschleppachsen werden so lange linear interpoliert, bis ein Linearsatz mit bewegten Hauptachsen programmiert wird. Ist dies der Fall, erfolgt eine automatische Wiederanwahl der Spline-Interpolation. Der Übergang in die Spline-Kurve erfolgt sowohl für die Hauptachsen als auch für die Mitschleppachsen tangential.
Zwischen den Linearsätzen, welche als Stützpunkte dienen, dürfen auch andere Funktionen (z.B. M-Funktionen) programmiert werden. Die Anzahl dieser Funktionen, die jeweils insgesamt zwischen fünf aufeinanderfolgenden Stützstellen programmiert werden dürfen, ist jedoch konfigurationsabhängig beschränkt.