Beispiel 1
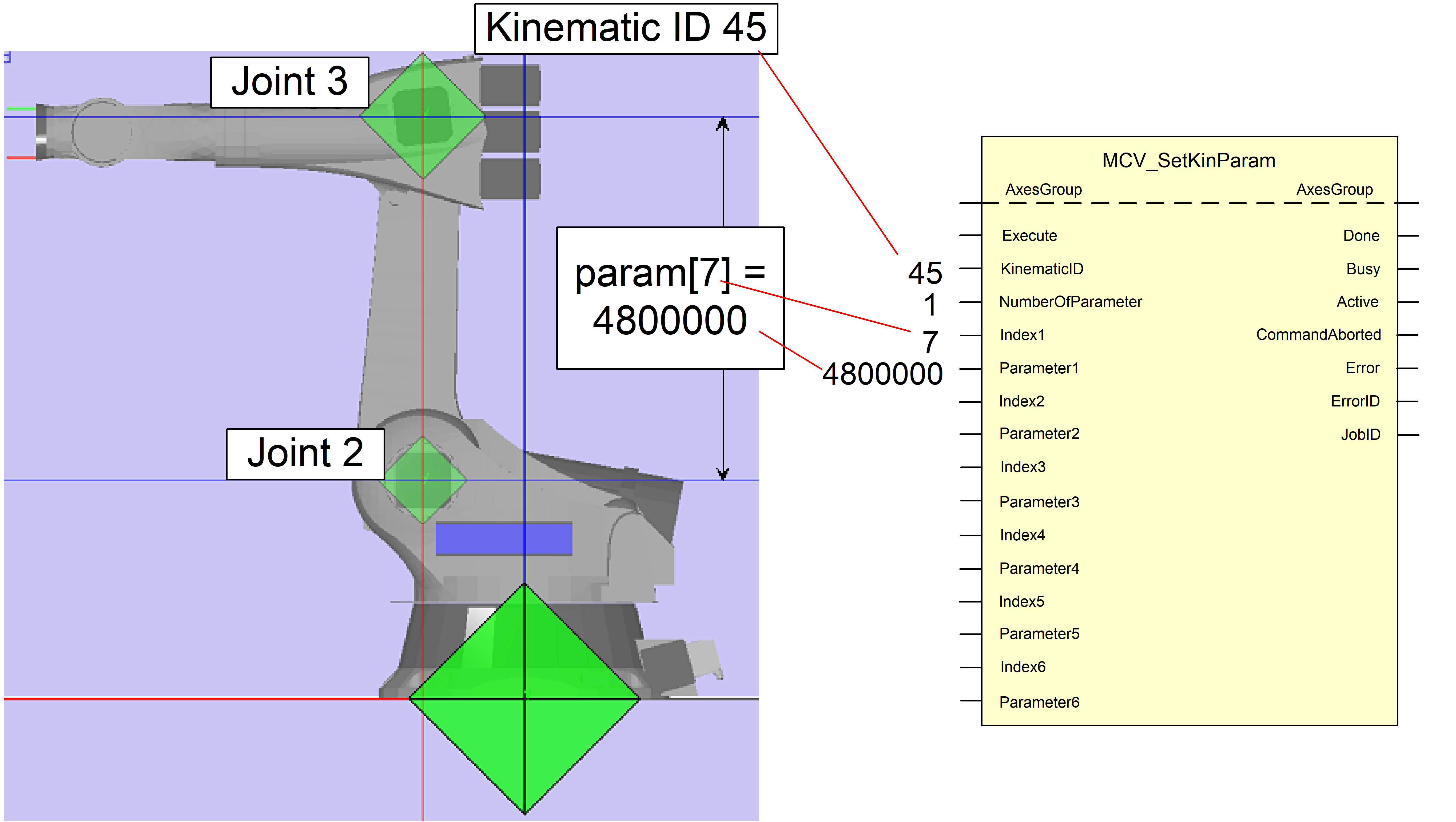
In der nachfolgenden Grafik ist dargestellt, dass param[7] der kinematischen Transformation mit ID=45 (Gelenkarmroboter mit 6 Maschinenachsen) die Länge des Roboterarms zwischen den Gelenken 2 und 3 ist, und wie diese Information über den MCV_SetKinParam an den Motion Controller übertragen werden kann.