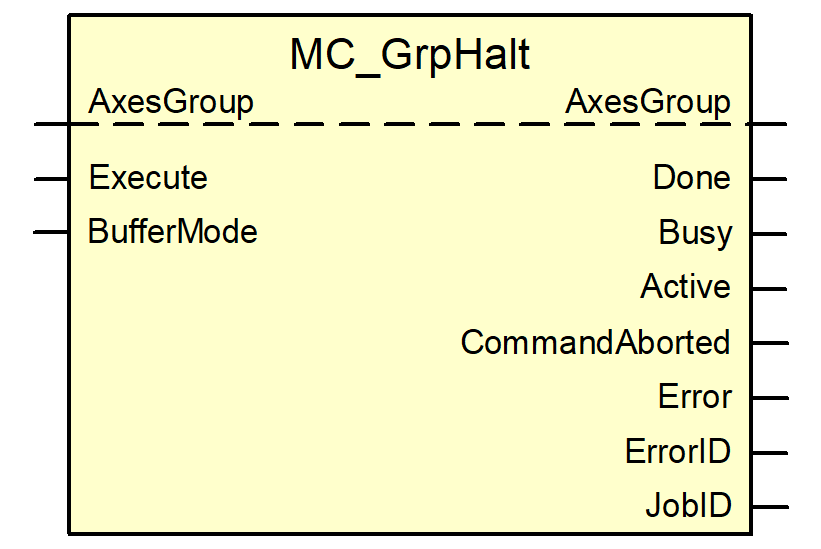
MC_GrpHalt
Der Funktionsbaustein führt zu einem gesteuerten Bewegungshalt. Er bricht jede laufende Beauftragung durch andere Bewegungs-FB ab.
Die Achsgruppe wechselt in den Zustand „GroupMoving“, bis die Geschwindigkeit 0 erreicht ist. Wenn der Ausgang „Done“ gesetzt wird, wechselt Achsgruppenzustand nach „GroupStandby“.
Blockdiagramm
Parameter des FB
VAR_IN_OUT | ||
Variablenname | Datentyp | Beschreibung |
AxesGroup | AXES_GROUP_REF | Achsgruppenreferenz |
VAR_INPUT | ||
Variablenname | Datentyp | Beschreibung |
Execute | BOOL | Startet die Beauftragung mit steigender Flanke. |
BufferMode | MC_BUFFER_MODE | Der Eingang legt fest, wann die Aktivierung eines Auftrags stattfindet, wenn bei der Beauftragung des FB bereits andere Aufträge aktiv sind oder auf die Ausführung warten. Folgende Modi werden unterstützt: mcAborting = 0 mcBuffered = 1 |
VAR_OUTPUT | ||
Variablenname | Datentyp | Beschreibung |
Done | BOOL | Geschwindigkeit 0 wurde erreicht, die Achse steht still. |
Busy | BOOL | TRUE zeigt an, dass der FB mit einem Auftrag beschäftigt ist. |
Active | BOOL | Die Beauftragung ist noch nicht abgeschlossen. |
CommandAborted | BOOL | Der Auftrag zum Anhalten wurde durch einen anderen Auftrag abgebrochen. |
Error | BOOL | TRUE zeigt an, dass ein Fehler aufgetreten ist. |
ErrorID | WORD | Fehlerkennung |
JobID | UDINT | Ordnungsnummer des letzten über den FB abgesetzten Auftrages. |