Übergangsbedingung: TMDynamicOptimized
Mit dieser Übergangsbedingung werden die achsspezifische Beschleunigung und der Ruck optimiert. Es wird keine geometrische Kurve berechnet.
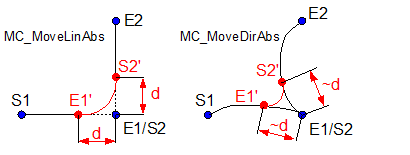
Der einzige Parameter, der bei Anwendung dieser Übergangsbedingung angegeben werden muss, definiert den Abstand von der Stelle an der mit dem Überschleifen begonnen werden soll bis zum Eckpunkt der aufeinander folgenden Bewegungen. Dies ist auch der Abstand vom Eckpunkt bis zu der Stelle, an der die Überschleifbewegung enden soll. Diesen Abstand d kann man sich als Radius einer Kugel mit dem Eckpunkt E1/E2 als Mittelpunkt vorstellen. Außerhalb dieser Kugel folgt der Werkzeugmittelpunkt der programmierten Bahn, innerhalb findet das Überschleifen statt.
Diese Übergangsbedingung wird für Punkt-zu-Punkt-Bewegungen empfohlen (MC_MoveDirAbs).
Übergangsparameter | Beschreibung |
TransitionParameter[0] | Der Abstand (d) von der Stelle an der die programmierte Bahn verlassen wird bis zum Eckpunkt der aufeinander folgenden Bewegungen. Wird diese Übergangsbedingung im Zusammenhang mit einem Funktionsblock MC_MoveDirAbs und einem Roboter (Punkt-zu-Punkt-Bewegungen) verwendet, ist der Abstand (d) nicht genau der Abstand zwischen E1‘ und E1 oder zwischen S2 und S2‘. |