MC_Halt
Der FB MC_Halt führt zu einem gesteuerten Bewegungshalt. Der Bewegungshalt wird immer ruckbegrenzt mit dem in „Jerk“ eingestellten konstanten Ruck für den Aufbau der Bremsverzögerung ausgeführt. Er bricht jede laufende Beauftragung durch andere Bewegungs-FBs ab.
Werden die optionalen Parameter „Deceleration“ und „Jerk“ nicht angegeben oder <= 0 gesetzt, so werden die Dynamikwerte aus der entsprechenden Achsliste übernommen.
Im Gegensatz zum FB MC_Stop kann ein beauftragter MC_Halt durch eine Beauftragung mit einem anderen Bewegungs-FB abgebrochen werden. Dabei wird der Ausgang „CommandAborted“ auf TRUE gesetzt.
Der FB MC_Halt setzt den Ausgang „Done“, sobald die Achse steht.
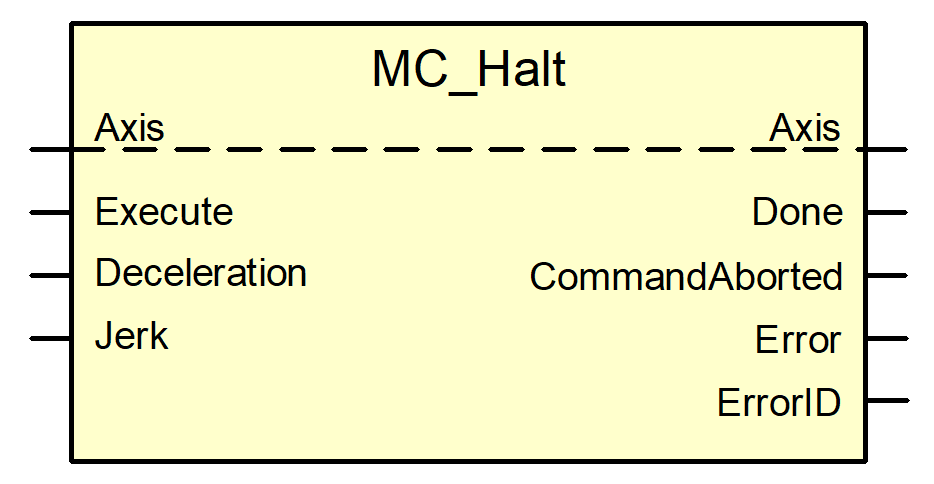
Blockdiagramm
Parameter des FB
VAR_IN_OUT | |||
Variablenname | Datentyp | Beschreibung | |
Axis | AXIS_REF | Achsreferenz | |
VAR_INPUT | |||
Variablenname | Datentyp | Beschreibung | |
Execute | BOOL | Startet die Beauftragung mit steigender Flanke. | |
Deceleration | LREAL | Wert der Verzögerung. Dieser Wert ist immer positiv anzugeben. Wertebereich [0.0, 2147483647.0] | |
Jerk | LREAL | Wert des Rucks. Dieser Wert ist immer positiv anzugeben. Wertebereich [0.0, 2147483647.0] | |
VAR_OUTPUT | |||
Variablenname | Datentyp | Beschreibung | |
Done | BOOL | Geschwindigkeit 0 wurde erreicht. | |
CommandAborted | BOOL | TRUE signalisiert, dass das Kommando durch eine andere Beauftragung abgebrochen wurde. | |
Error | BOOL | Ist TRUE, wenn ein Fehler im FB auftritt | |
ErrorID | WORD | Fehlerkennung | |
Verhalten des FB:
- Die Eingangsvariablen „Deceleration“ und „Jerk“ werden innerhalb des FB nur auf ihren Wertebereich überwacht. Bei Überschreiten wird eine die Variable betreffende Fehlernummer am Ausgang „ErrorID“ ausgegeben und „Error“ auf TRUE gesetzt. Darüber hinaus findet eine Begrenzung der Verzögerung innerhalb des Motion Controllers statt. Wird eine Verzögerung größer als getriebe[0].dynamik.a_max (P-AXIS-00008) kommandiert, so wird die Bewegung trotzdem durchgeführt, die Werte werden jedoch auf die parametrierten Werte begrenzt und eine Warnung wird ausgegeben.
- Sinnvolle Werte für den Ruck liegen zwischen dem Minimalruck von Deceleration/100 s und dem Maximalruck von Deceleration/TA. Bei der minimalen Rampenzeit von TA liegt der Grenzübergang zur nicht ruckbegrenzten Geschwindigkeitsführung. Bei einem Wert von 0 wird zur Bestimmung des Rucks die maximale Rampenzeit aus P-AXIS-00195 bis P-AXIS-00198 verwendet.