Definition von Koordinatensystemen
Bedingt durch die Struktur einer Maschine als auch durch die Bearbeitungsprogramme müssen verschiedene Koordinatensysteme berücksichtigt werden. Die Gesamtheit einer Maschine stellt das Bezugskoordinatensystem in Weltkoordinaten dar. Die einzelnen Achsen definieren selbst wiederum Koordinatensysteme sowie das Werkstück und das Werkzeug.
Nachfolgend sind die wesentlich verwendeten zwei unterschiedlichen Koordinatensysteme aufgeführt.
Achsen-Koordinatensystem acs (axes coordinate system)
Jede Achse hat ihr eigenes Koordinatensystem. Eine Achse ist entweder an den Maschinengrundkörper oder auf eine andere Achse montiert. Die Basis stellt damit der Maschinengrundkörper oder die entsprechende Achse dar. Das Achsenkoordinatensystem einer Achse ist fest bzgl. des Montagepunktes dieser Achse.
Teileprogramm-Koordinatensystem pcs (partprogramm coordinate system)
Dieses Koordinatensystem wird innerhalb der Geometriebeschreibung mittels DIN 66025 Programmiersprache verwendet. Die Daten in einem Teileprogramm sind Programmkoordinaten. Ausnahmen sind G-Funktionen, die sich auf direkte Achsenkoordinaten beziehen.
Zur Vollständigkeit sollen noch weitere Koordinatensystembezeichnungen aufgelistet werden.
Maschinen-Koordinatensystem mcs (machine coordinate system)
Das Maschinenkoordinatensystem stellt ein abstraktes Koordinatensystem dar. Es ist nicht an einen festen Punkt der Maschine gebunden. Alle anderen Koordinatensysteme beziehen sich auf dieses Koordinatensystem.
Werkstück-Koordinatensystem wcs (workpiece coordinate system)
Dieses Koordinatensystem ist fixiert an einen festen Punkt des Werkstücks. Die Beschreibung des Werkstücks durch Koordinatenangaben bezieht sich auf dieses System.
Werkzeug-Koordinatensystem tcs (tool coordinate system)
Das Werkzeugkoordinatensystem hat seinen Ursprung an der Aufspannung des Werkzeugs. Werkzeugangaben (Geometrie) beziehen sich auf dieses System. Eine Längenkorrektur wird daher in Werkzeugkoordinaten angegeben. Bei kartesischen Maschinen kann die Z-Achse mit der Längenkorrektur zusammenfallen.
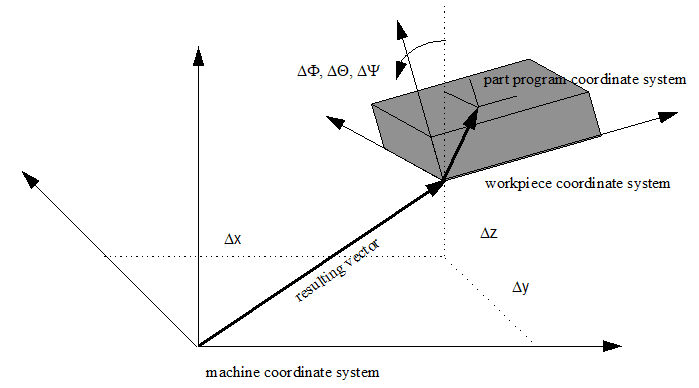
Daten oder Variablen, die im Folgenden beschrieben werden, beziehen sich daher immer auf ein bestimmtes Koordinatensystem. In obigem Bild sind drei Koordinatensysteme eingezeichnet. Die eingezeichneten Verschiebungen ∆x, ∆y, ∆z sowie die Orientierungen ∆Φ, ∆Θ, ∆Ψ repräsentieren die Transformationsparameter vom mcs zum wcs. Bei den Orientierungswinkeln handelt es sich um Euler-Winkel.
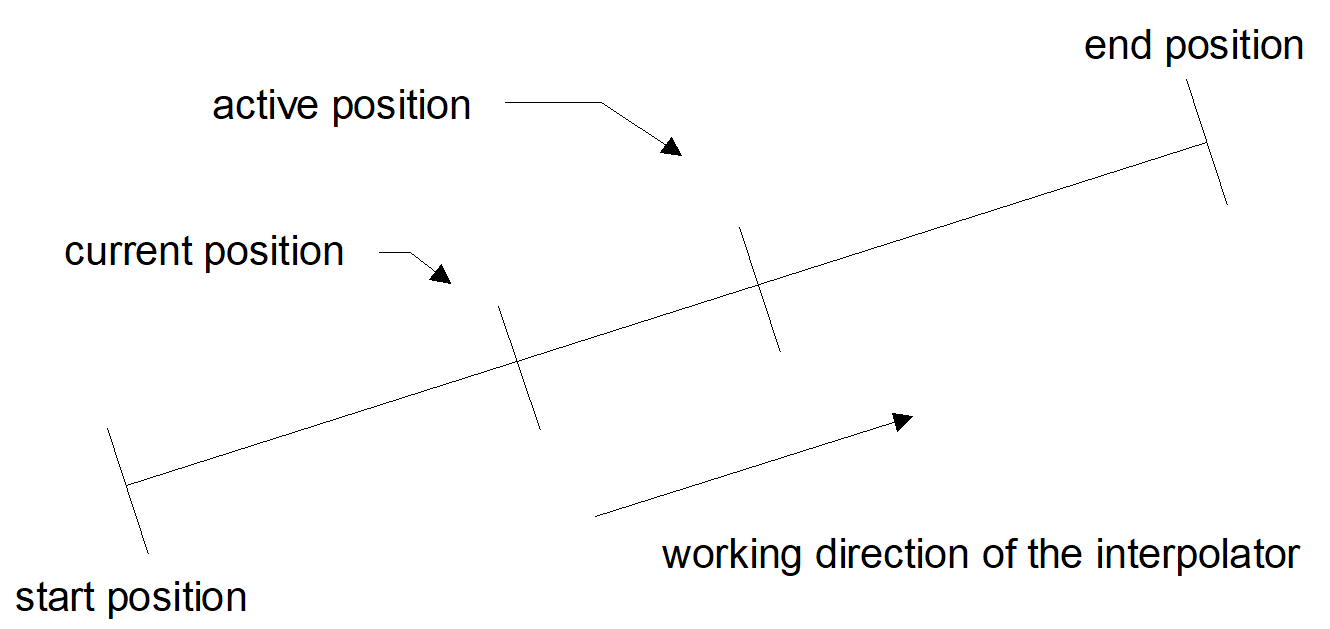
Die Namensgebung muss durch einen weiteren Zusatz ergänzt werden, um den zeitlichen Aspekt zu berücksichtigen. Im nachfolgenden Bild ist die Bearbeitungsrichtung eines Bearbeitungssatzes gezeigt. Die end position stellt den programmierten Wert dar, active position den momentanen Wert des Interpolators und current position die tatsächliche Position einschließlich des Regelfehlers.